
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- html - 出于某种原因,IE8 对我的 Sass 文件中继承的 html5 CSS 不友好?
- JMeter 在响应断言中使用 span 标签的问题
- html - 在 :hover and :active? 上具有不同效果的 CSS 动画
- html - 相对于居中的 html 内容固定的 CSS 重复背景?



 26
26
 4
4


我正在编写一些机器人运动学代码,我首先编写了用于计算关节角度的朴素的、有意未优化的函数,这样我就可以使用逻辑分析仪测量时序,并有一种切实可行的方法来测量增益在定点数学等优化中。
我有两个正在玩的微 Controller 板:Teensy 2.0 和 Teensy 3.0。我正在使用 Arduino 环境为他们构建代码。与大多数 Arduino 一样,2.0 是一个 8 位 16MHz AVR。 3.0 是 32 位 48MHz ARM cortex M4。
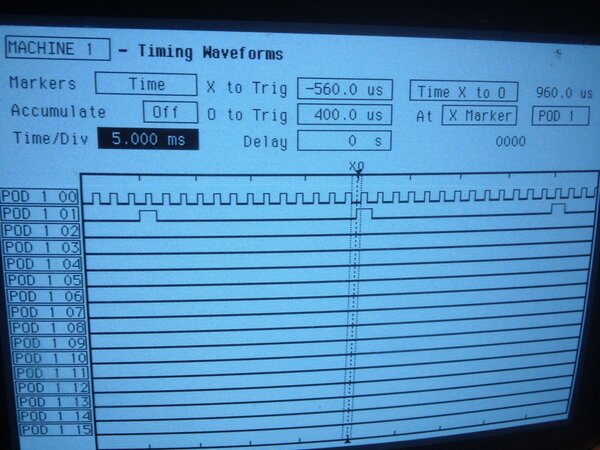
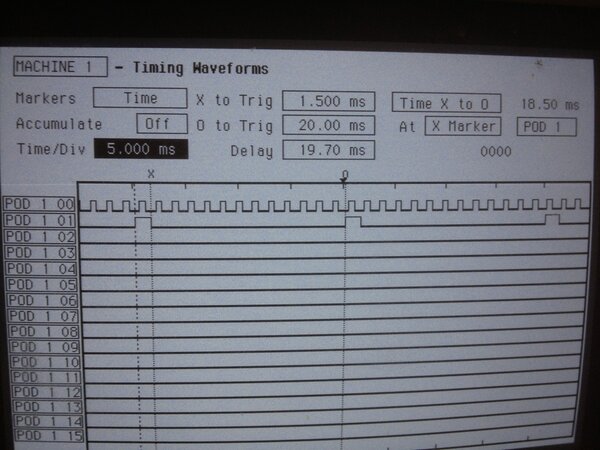
代码将引脚拉低,进行一条腿的 IK 计算,然后将引脚拉回高位。我正在使用古老的逻辑分析仪来测量线路处于低电平的时间。
奇怪的是 ARM 板的边缘之间的时间明显更长! AVR 在大约 960 微秒内完成,但 ARM 需要大约 18.5 毫秒!
这在我看来并不成立。有没有人知道为什么会这样?
这是我正在使用的代码。不要介意它是故意未优化的,可能我数学不好,但这不是这里的问题:)
#include <math.h>
#define lc 21.0
#define lf 40.0
#define lt 62.0
#define lfsqrd 1600.0
#define ltsqrd 3844.0
struct Vector {
double x;
double y;
double z;
};
struct Joints {
double c;
double f;
double t;
};
void calc_joints(struct Vector *foot, struct Joints *joints) {
double l1 = sqrt(pow(foot->y,2) + pow(foot->x, 2));
double l2 = l1 - lc;
double l3 = sqrt(pow(foot->z,2) + pow(l2, 2));
double tx = atan2(l2, foot->z);
double ty = acos( (pow(l3,2) + lfsqrd - ltsqrd) / (2 * l3 * lf) );
// todo: convert these from radians to degrees
joints->c = atan2(foot->y, foot->x);
joints->f = tx + ty;
joints->t = acos( (lfsqrd + ltsqrd - pow(l3,2)) / (2 * lf * lt) );
}
void setup() {
Serial.begin(9600);
pinMode(0, OUTPUT);
digitalWrite(0, HIGH);
}
void loop() {
digitalWrite(0, LOW);
struct Vector v = { 10, 20, 30 };
struct Joints j;
calc_joints(&v, &j);
digitalWrite(0, HIGH);
Serial.print(j.c);
Serial.print(", ");
Serial.print(j.f);
Serial.print(", ");
Serial.println(j.t);
}
最佳答案
ARM cortex M4
Cortex M4 中的 FPU 仅支持单精度,但您在代码中使用了很多双。这意味着软件计算而不是硬件。您是否尝试过将 double 变量和函数调用更改为 float?
关于c - 基于 ARM 的 arduino 型系统比基于 AVR 的系统慢得多,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/15017061/
26
4
 0
0
自己试试看: import pandas as pd s=pd.Series(xrange(5000000)) %timeit s.loc[[0]] # You need pandas 0.15.1
我最近开始使用 Delphi 中的 DataSnap 来生成 RESTful Web 服务。在遵循 Marco Cantu 本人和互联网上其他几个人的指导后,我成功地使整个“链条”正常工作。 但是有一
我一直在为操作系统类(class)编写以下代码,但结果有些奇怪。该代码创建x线程并同时运行它们,以便将两个平方矩阵相乘。每个线程将输入矩阵的Number_of_rows/Number_of_threa
我正在尝试确定何时使用 parallel包以加快运行某些分析所需的时间。我需要做的一件事是创建矩阵,比较具有不同行数的两个数据框中的变量。我在 StackOverflow 上问了一个关于有效方法的问题
我最近对我的代码进行了一些清理,并在此过程中更改了此内容(不完全是真实的代码): read = act readSTRef test1 term i var = do t v^!terms.
我正在计时查询和同一个查询的执行时间,分页。 foreach (var x in productSource.OrderBy(p => p.AdminDisplayName) .Wher
我正在开发一个项目 (WPF),我有一个 Datagrid 从数据库加载超过 5000 条记录,所以我使用 BackgroundWorker 来通知用户数据正在加载,但它太慢了,我需要等待将近 2分钟
我在查询中添加 ORDER BY 时遇到问题。没有 ORDER BY 查询大约需要 26ms,一旦我添加 ORDER BY,它大约需要 20s。 我尝试了几种不同的方法,但似乎可以减少时间。 尝试 F
我是 Android 开发新手,遇到了性能问题。当我的 GridView 有太多项目时,它会变得有点慢。有什么方法可以让它运行得更快一些吗? 这是我使用的代码: 适配器: public class C
这里的要点是: 1.设置query_cache_type = 0;重置查询缓存; 2.在 heidisql(或任何其他客户端 UI)中运行任何查询 --> 执行,例如 45 毫秒 3.使用以下代码运行
想象下表: CREATE TABLE drops( id BIGSERIAL PRIMARY KEY, loc VARCHAR(5) NOT NULL, tag INT NOT
我的表 test_table 中的示例数据: date symbol value created_time 2010-01-09 symbol1
首先,如果已经有人问过这个问题,我深表歉意,至少我找不到任何东西。 无论如何,我将每 5 分钟运行一次 cron 任务。该脚本加载 79 个外部页面,而每个页面包含大约 200 个我需要在数据库中检查
我有下面的 SQL 代码,它来自 MySQL 数据库。现在它给了我期望的结果,但是查询很慢,我想我应该在进一步之前加快这个查询的速度。 表agentstatusinformation有: PKEY(主
我需要获取一个对象在 Core Data 中数千个其他对象之间的排名。现在,这是我的代码: - (void)rankMethod { //Fetch all objects NSFet
我正在编写一个应用程序,我需要在其中读取用户的地址簿并显示他所有联系人的列表。我正在测试的 iPhone 有大约 100 个联系人,加载联系人确实需要很多时间。 ABAddressBookRef ad
我正在使用 javascript 将 160 行添加到包含 10 列的表格中。如果我这样做: var cellText = document.createTextNode(value); cell.a
我是 Swift 的新手,我已经设置了一个 tableView,它从 JSON 提要中提取数据并将其加载到表中。 表格加载正常,但是当表格中有超过 10 个单元格时,它会变得缓慢且有些滞后,特别是它到
我在 InitializeCulture 和 Page_PreInit 事件之间的 asp.net 页面中遇到性能问题。当我重写 DeterminePostBackMode() 时,我发现问题出在 b
我在 Hetzner 上有一个带有 256GB RAM 6 个 CPU(12 个线程) 的专用服务器,它位于德国。我有 CENTOS 7.5。 EA4。 我的问题是 SSL。每天大约 2 小时,我们在

我是一名优秀的程序员,十分优秀!