
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- html - 出于某种原因,IE8 对我的 Sass 文件中继承的 html5 CSS 不友好?
- JMeter 在响应断言中使用 span 标签的问题
- html - 在 :hover and :active? 上具有不同效果的 CSS 动画
- html - 相对于居中的 html 内容固定的 CSS 重复背景?



 26
26
 4
4


我正在实现触摸屏 UI 的滚动行为,但我现在太累了,无法将我的思绪放在一些所谓的微不足道的数学上:
y (distance/velocity)
|********
| ******
| ****
| ***
| ***
| **
| **
| *
| *
-------------------------------- x (time)
最佳答案
[简短回答(假设 C 语法)]
double v(double old_v, double dt) {
t = t_for(old_v);
new_t = t - dt;
return (new_t <= 0)?0:v_for(t);
}
double t_for(double v)和
double v_for(double t)是从 v 到 t 双向映射(数学意义上的函数)的返回值,它是任意的,约束条件是它是单调的并且为
v >=0 定义(因此有一个点
v=0 )。一个例子是:
double v_for(double t) { return pow(t, k); }
double t_for(double v) { return pow(v, 1.0/k); }
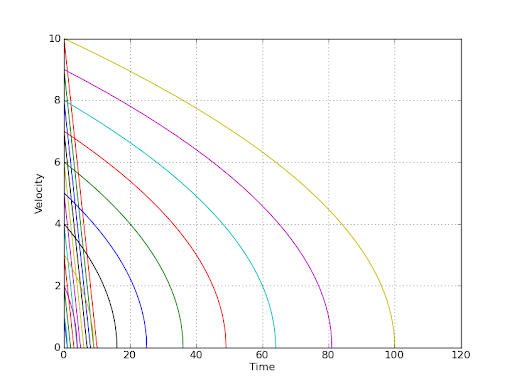
k>1随着时间的推移,减速度以模数递减。 k<1随着时间的推移,减速度以模数增加。 k=1给出恒定的减速。 v(t+dt)=f(v(t),dt)获取当前速度值 v和时间增量 dt并返回当前速度 t+dt (它不需要实际指定 t,因为 v(t) 已经知道并作为参数提供,而 dt 只是时间增量)。换句话说,任务是实现一个例程double next_v(curr_v, dt);具有特定属性(见下文)。 v0=100 ),任何其他大于此的序列都将具有相同的“尾部”:[150 , 100, 50, 10, 0] (对于起始速度 v0=150 )等。换句话说,无论起始速度如何,所有速度-时间图都将有效地相互复制,只是沿时间偏移每个轴按其自己的值(参见下图,注意线 t=0.0 和 t=2.0 之间的绘图部分是相同的)。 w(t)=dv(t)/dt必须是时间的递减函数 t (为了我们在这里建模的移动 GUI 对象的视觉上令人愉悦和“直观”的行为)。 v(t) = k*t (不完全是你的情况,因为减速 k 在这里是恒定的),v=sqrt(-t) (这个没问题,在区间 t <= 0 上定义)。 1.0 到
10.0 ),并且,正如你所看到的,从任何给定的速度“水平”和“向下”,图“表现”这当然是相同的,因为无论您以什么速度开始减速(减速),您都将沿着相同的曲线相对于速度为零(变为)零的点“移动”:
import numpy
import pylab
import math
class VelocityCurve(object):
"""
An interface for the velocity 'curve'.
Must represent a _monotonically_ _growing_
(i.e. with one-to-one correspondence
between argument and value) function
(think of a deceleration reverse-played)
Must be defined for all larger-than-zero 'v' and 't'
"""
def v(self, t):
raise NotImplementedError
def t(self, v):
raise NotImplementedError
class VelocityValues(object):
def __init__(self, v0, velocity_curve):
assert v0 >= 0
assert velocity_curve
self._v = v0
self._vc = velocity_curve
def next_v(self, dt):
t = self._vc.t(self._v)
new_t = t - dt
if new_t <= 0:
self._v = 0
else:
self._v = self._vc.v(new_t)
return self._v
class LinearVelocityCurve(VelocityCurve):
def __init__(self, k):
"""k is for 'v(t)=k*t'"""
super(LinearVelocityCurve, self).__init__()
self._k = k
def v(self, t):
assert t >= 0
return self._k*t
def t(self, v):
assert v >= 0
return v/self._k
class RootVelocityCurve(VelocityCurve):
def __init__(self, k):
"""k is for 'v(t)=t^(1/k)'"""
super(RootVelocityCurve, self).__init__()
self._k = k
def v(self, t):
assert t >= 0
return math.pow(t, 1.0/self._k)
def t(self, v):
assert v >= 0
return math.pow(v, self._k)
def plot_v_arr(v0, velocity_curve, dt):
vel = VelocityValues(v0, velocity_curve)
v_list = [v0]
while True:
v = vel.next_v(dt)
v_list.append(v)
if v <= 0:
break
v_arr = numpy.array(list(v_list))
t_arr = numpy.array(xrange(len(v_list)))*dt
pylab.plot(t_arr, v_arr)
dt = 0.1
for v0 in range(1, 11):
plot_v_arr(v0, LinearVelocityCurve(1), dt)
for v0 in range(1, 11):
plot_v_arr(v0, RootVelocityCurve(2), dt)
pylab.xlabel('Time ')
pylab.ylabel('Velocity')
pylab.grid(True)
pylab.show()
t 间隔增加不同的功能,甚至平滑手绘(记录)“人体工学”曲线)他喜欢的“拖动”:)
关于user-interface - 如何计算负加速度?,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/2298763/
26
4
 0
0
编写一个仅用于集中其他接口(interface)的接口(interface)是好的做法还是坏的做法? interface InterfaceA : InterfaceB, InterfaceC { }
有没有一种方法可以确定具体类型从任意接口(interface)列表?我知道类型转换,但我想知道所有满意的接口(interface)。 例如,给定: type Mover interface { Mo
我正在尝试制作斐波那契堆。 (在我正在上的算法课中多次提到它们,我想检查一下。)我希望堆使用任何类型的节点,所以我定义了一个 Node 接口(interface): package node type
这是我的代码: type IA interface { FB() IB } type IB interface { Bar() string } type A struct {
示例 A: // pseudo code interface IFoo { void bar(); } class FooPlatformA : IFoo { void bar() {
合并它编译的 leppies 反馈 - 但 IMO 有一些缺点,我希望编译器强制每个子类定义它们自己的 Uri 属性。现在的代码: [] type UriUserControl() = inh
我正在构建一个项目,该项目从用户那里获取一个术语,然后执行谷歌搜索并返回一个 json 格式的标题列表。 我正在使用 serpwow API 来执行谷歌搜索并试图解析响应。 但是我收到的错误是: pa
我只想在其他接口(interface)中实现某些接口(interface),我不希望它们能够被类直接继承。 提前致谢! 最佳答案 您不能在 C# 中执行此操作 - 任何类都可以实现它有权访问的任何接口
我是 Go 的新手,还有一些我还没有掌握的技巧 例如,我有一个可以这样调用的函数: myVar.InitOperation("foo",Operator.EQUAL,"bar") myVar.Init
我有一个通用接口(interface)来描述对输出流的访问,如下所示: interface IOutput { function writeInteger(aValue:Int):Void;
我正在做一个项目,我想通过某种接口(interface)(最好是 USB)将光电探测器电路安装到计算机上。但是,由于我是新手,所以我不知道应该朝哪个方向处理这个问题。假设我有一个带有 USB 连接的光
背景 我正在尝试创建一个简单的应用程序,以真正理解DDD + TDD + etc的整个堆栈。我的目标是在运行时动态注入DAL存储库类。这让我 域和应用程序服务层可测试。我打算用“穷人的DI”来完成 现
在 Java 中,接口(interface)扩展接口(interface)是完全合法的。 UML 中的这种关系看起来像“扩展”关系(实线、闭合、未填充的箭头)还是“实现”关系(虚线、闭合、未填充的箭头
我想创建一个具有相等和比较函数默认实现的接口(interface)。 如果我从类型 IKeyable 中删除所有内容除了Key成员,只要我不添加默认实现,它就是一个有效的接口(interface)。从
COM 中的双接口(interface)是能够通过 DispInterface 或 VTable 方法访问的接口(interface)。 现在有人可以告诉我这两种方法之间到底有什么区别吗? 我认为 V
我有一个类方法,它返回一个可以迭代的员工列表。返回列表的最佳方式是什么?通常我只返回一个 ArrayList。然而,据我了解,界面更适合这种类型的操作。哪个是最好使用的界面?另外,为什么返回接口(in
我想从包装类外部实例化一个内部非静态接口(interface)。 这可能吗? 考虑以下代码: shared class AOuterClass() { Integer val = 3; shared
我为一个类编写了一个接口(interface),如下所示: public interface IGenericMultipleRepository { Lazy> addresses { ge
我是 UML 的初学者,现在我正在创建一个序列图,问题是我想根据用户输入实现 DAO 接口(interface)。如何在时序图中正确绘制以实现接口(interface)。 最佳答案 您不会在 SD 上
要使用 jsr 303 验证创建有条件验证的组,请将接口(interface)类传递给注释,如下所示: @NotEmpty (groups={UpdateValue.class}) 我有很多不同的接口

我是一名优秀的程序员,十分优秀!