
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- iOS/Objective-C 元类和类别
- objective-c - -1001 错误,当 NSURLSession 通过 httpproxy 和/etc/hosts
- java - 使用网络类获取 url 地址
- ios - 推送通知中不播放声音



 24
24
 4
4


我正在尝试将 2D 点重新投影到它们的原始 3D 坐标,假设我知道每个点的距离。关注OpenCV documentation ,我设法让它以零失真工作。然而,当存在扭曲时,结果是不正确的。
因此,我们的想法是反转以下内容:
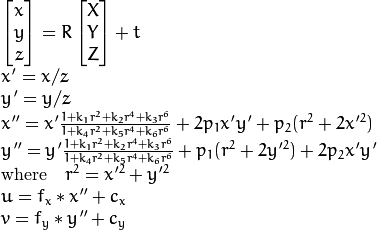
进入以下:

通过:
cv::undistortPoints 消除任何扭曲z 以反转归一化。f_x 和 f_y 才能返回标准化相机坐标(测试时凭经验找到)?在下面的代码中,在第 2 步中,如果我不减去——即使没有扭曲的结果也是关闭的#include <iostream>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <vector>
std::vector<cv::Point2d> Project(const std::vector<cv::Point3d>& points,
const cv::Mat& intrinsic,
const cv::Mat& distortion) {
std::vector<cv::Point2d> result;
if (!points.empty()) {
cv::projectPoints(points, cv::Mat(3, 1, CV_64F, cvScalar(0.)),
cv::Mat(3, 1, CV_64F, cvScalar(0.)), intrinsic,
distortion, result);
}
return result;
}
std::vector<cv::Point3d> Unproject(const std::vector<cv::Point2d>& points,
const std::vector<double>& Z,
const cv::Mat& intrinsic,
const cv::Mat& distortion) {
double f_x = intrinsic.at<double>(0, 0);
double f_y = intrinsic.at<double>(1, 1);
double c_x = intrinsic.at<double>(0, 2);
double c_y = intrinsic.at<double>(1, 2);
// This was an error before:
// double c_x = intrinsic.at<double>(0, 3);
// double c_y = intrinsic.at<double>(1, 3);
// Step 1. Undistort
std::vector<cv::Point2d> points_undistorted;
assert(Z.size() == 1 || Z.size() == points.size());
if (!points.empty()) {
cv::undistortPoints(points, points_undistorted, intrinsic,
distortion, cv::noArray(), intrinsic);
}
// Step 2. Reproject
std::vector<cv::Point3d> result;
result.reserve(points.size());
for (size_t idx = 0; idx < points_undistorted.size(); ++idx) {
const double z = Z.size() == 1 ? Z[0] : Z[idx];
result.push_back(
cv::Point3d((points_undistorted[idx].x - c_x) / f_x * z,
(points_undistorted[idx].y - c_y) / f_y * z, z));
}
return result;
}
int main() {
const double f_x = 1000.0;
const double f_y = 1000.0;
const double c_x = 1000.0;
const double c_y = 1000.0;
const cv::Mat intrinsic =
(cv::Mat_<double>(3, 3) << f_x, 0.0, c_x, 0.0, f_y, c_y, 0.0, 0.0, 1.0);
const cv::Mat distortion =
// (cv::Mat_<double>(5, 1) << 0.0, 0.0, 0.0, 0.0); // This works!
(cv::Mat_<double>(5, 1) << -0.32, 1.24, 0.0013, 0.0013); // This doesn't!
// Single point test.
const cv::Point3d point_single(-10.0, 2.0, 12.0);
const cv::Point2d point_single_projected = Project({point_single}, intrinsic,
distortion)[0];
const cv::Point3d point_single_unprojected = Unproject({point_single_projected},
{point_single.z}, intrinsic, distortion)[0];
std::cout << "Expected Point: " << point_single.x;
std::cout << " " << point_single.y;
std::cout << " " << point_single.z << std::endl;
std::cout << "Computed Point: " << point_single_unprojected.x;
std::cout << " " << point_single_unprojected.y;
std::cout << " " << point_single_unprojected.z << std::endl;
}
import cv2
import numpy as np
def Project(points, intrinsic, distortion):
result = []
rvec = tvec = np.array([0.0, 0.0, 0.0])
if len(points) > 0:
result, _ = cv2.projectPoints(points, rvec, tvec,
intrinsic, distortion)
return np.squeeze(result, axis=1)
def Unproject(points, Z, intrinsic, distortion):
f_x = intrinsic[0, 0]
f_y = intrinsic[1, 1]
c_x = intrinsic[0, 2]
c_y = intrinsic[1, 2]
# This was an error before
# c_x = intrinsic[0, 3]
# c_y = intrinsic[1, 3]
# Step 1. Undistort.
points_undistorted = np.array([])
if len(points) > 0:
points_undistorted = cv2.undistortPoints(np.expand_dims(points, axis=1), intrinsic, distortion, P=intrinsic)
points_undistorted = np.squeeze(points_undistorted, axis=1)
# Step 2. Reproject.
result = []
for idx in range(points_undistorted.shape[0]):
z = Z[0] if len(Z) == 1 else Z[idx]
x = (points_undistorted[idx, 0] - c_x) / f_x * z
y = (points_undistorted[idx, 1] - c_y) / f_y * z
result.append([x, y, z])
return result
f_x = 1000.
f_y = 1000.
c_x = 1000.
c_y = 1000.
intrinsic = np.array([
[f_x, 0.0, c_x],
[0.0, f_y, c_y],
[0.0, 0.0, 1.0]
])
distortion = np.array([0.0, 0.0, 0.0, 0.0]) # This works!
distortion = np.array([-0.32, 1.24, 0.0013, 0.0013]) # This doesn't!
point_single = np.array([[-10.0, 2.0, 12.0],])
point_single_projected = Project(point_single, intrinsic, distortion)
Z = np.array([point[2] for point in point_single])
point_single_unprojected = Unproject(point_single_projected,
Z,
intrinsic, distortion)
print "Expected point:", point_single[0]
print "Computed point:", point_single_unprojected[0]
零失真的结果(如前所述)是正确的:
Expected Point: -10 2 12
Computed Point: -10 2 12
但是当包含失真时,结果是关闭的:
Expected Point: -10 2 12
Computed Point: -4.26634 0.848872 12
这是一个相机到图像的投影——我假设 3D 点在相机坐标系中。
好的,我算出了 f_x 和 f_y 的减法——我愚蠢到把索引弄乱了。更新了代码以更正。另一个问题仍然成立。
为了增加可见性,添加Python代码,因为它有同样的错误。
最佳答案
我发现问题所在 -- 3D 点坐标很重要!我假设无论我选择什么 3D 坐标点,重建都会解决它。然而,我注意到一些奇怪的事情:当使用一系列 3D 点时,只有这些点的一个子集被正确重建。经过进一步调查,我发现只有在相机视野中的图像才能正确重建。视野是内在参数的函数(反之亦然)。
要使上述代码正常工作,请尝试按如下方式设置参数(内部参数来 self 的相机):
...
const double f_x = 2746.;
const double f_y = 2748.;
const double c_x = 991.;
const double c_y = 619.;
...
const cv::Point3d point_single(10.0, -2.0, 30.0);
...
此外,不要忘记在相机坐标中负 y 坐标是 UP :)
在我尝试使用访问内在函数时出现了一个错误
...
double f_x = intrinsic.at<double>(0, 0);
double f_y = intrinsic.at<double>(1, 1);
double c_x = intrinsic.at<double>(0, 3);
double c_y = intrinsic.at<double>(1, 3);
...
但是 intrinsic 是一个 3x3 矩阵。
故事的寓意编写单元测试!!!
关于python - OpenCV unproject 2D 指向具有已知深度 `Z` 的 3D,我们在Stack Overflow上找到一个类似的问题: https://stackoverflow.com/questions/51272055/
24
4
 0
0
有人能给我解释一下我下面程序中的一点吗我编写的以下程序是为了理解 int * const * var 的含义; #include "iostream" using namespace std ; in
我正在摆弄 C 中的指针,但仍然不确定一些非常基础的知识。我想出了以下示例代码: #include int main(void) { int num = 42; /
以下代码产生警告: const char * mystr = "\r\nHello"; void send_str(char * str); void main(void){ send_str
我正在尝试在我的 Linux 计算机上升级 cmake。这是我使用的命令。 删除旧的 cmake: sudo apt purge --auto-remove cmake 从 https://cmake
我试图借助 char 指针来追踪 union 第一个字节的值。我假设 byte1 的输出应该是 ff,但实际上是 ffffffff。如果我错了请纠正我。 #include #include #in
我正在使用微 Controller 进行一些 ADC 测量。当我尝试使用 -O2 优化编译以下代码时遇到问题,当代码中存在 PrintVal() 函数时,MCU 卡住。我做了一些调试,结果发现,当我添
#include #include using namespace std; int main () { vector qwerty; qwerty.push_back(5);
我有我的 woking setup.py 文件;其中包含以下行: home = os.environ["HOME"] # home = /home/dr in my machine; distu
这段代码 #include #include static_assert(std::is_same_v::value_type, volatile int>); 在最新的 GCC 和 clang
我对 C 中的前向声明有疑问。 代码 typedef struct yhash_s t_yhash;// forward declaration struct yhash_s { size_t
我想提取成员指针指向的成员的类型。 template void demo(myClass& instance, void* ptr) { instance.*member = *reinter
我正在尝试使用指针将一段 C 代码转换为 Swift 3。这是 C 代码中的相关部分。 Float32 sampleArray[256] = { // Array is 256 Float value
您可能知道,VLA's haves pros and cons 和它们在 C11 中是可选的。 我想使 VLA 成为可选项的主要原因是:“堆栈可能会爆炸”: int arr[n]; /* where
这段代码有什么错误?为什么我不能按照我尝试的方式取消引用该元素。 #include typedef struct { int value; struct node * left;
有什么方法可以在 JavaScript 中创建\返回指向变量的指针吗? 比如,在 PHP 中: function func() { ..... return &$result; } 我
如果您想使用方法的指针作为参数,则需要将该方法键入作为对象的函数,就像这样好 : type TAcceptor = function(filename:string):boolean of objec
很简单的问题: 我对 C++ 中的智能指针有点陌生。我想我得到了所有权的东西,但我不知道如何访问他们实际指向的内容。当我尝试使用对象的成员函数/变量时,我只是得到了 unique_ptr 类的函数,这
我得到了一个点的方位 Angular 、指南针方向和一个可以将箭头设置到某个方向的 api(0 是顶部,90 是右侧,180 是底部,360 是顶部) 如果我希望箭头指向我采用方位 Angular 形
我正在尝试找到一种方法,从单元格中获取位于当前工作表左侧(托盘下方)的工作表单元格中的数据。 我知道如何通过调用其他工作表 =Sheet1!A1 但现在我需要一些最好的解释 =Sheet[-1]!A1
所以我在 MATLAB 中有一个 for 循环,其中向量 x 将通过一个函数,比如 cos(x).^2,或者不同的选择,比如 sin(x).^2 + 9.*x。用户将在 for 循环之前选择他想使用的

我是一名优秀的程序员,十分优秀!