
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 26
26
 4
4


why witout Thonny?
最近闲来在ESP32上用MicroPython捣鼓些小玩具,见很多教程推荐使用Thonny。欣然往之,竟是个这,实在不能认同。Thonny esp32-MicroPython开发的入门最佳实践?no! 。
使用 esptool.py 将 MicroPython 刷入 ESP32 开发板涉及几个步骤.
如果你还没有安装 esptool.py ,你可以使用 pip 来安装它:
pip install esptool
MicroPython - Python for microcontrollers 。
前往 MicroPython 的官方网站,找到 ESP32 的固件,然后下载合适的 .bin 文件。确保选择与你的 ESP32 开发板兼容的版本.
使用适当的 USB 数据线将 ESP32 开发板连接到你的计算机.
在终端或命令提示符中,使用以下命令查找 ESP32 的串口:
ls /dev/tty.*
记下 ESP32 的串口名,例如 /dev/ttyUSB0 。
为了确保 MicroPython 正确地安装在 ESP32 上,首先擦除开发板上的现有固件:
esptool.py --port <YOUR_PORT> erase_flash
将 <YOUR_PORT> 替换为你在第4步中找到的串口名.
使用以下命令将 MicroPython 固件刷入 ESP32:
esptool.py --chip esp32 --port <YOUR_PORT> write_flash -z 0x1000 <PATH_TO_YOUR_MICROPYTHON_BIN_FILE>
替换 <YOUR_PORT> 为你的串口名,并将 <PATH_TO_YOUR_MICROPYTHON_BIN_FILE> 替换为你下载的 .bin 文件的路径.
完成刷入操作后,断开并重新连接 ESP32 的电源,或使用开发板上的复位按钮进行复位.
现在,ESP32 上应该已经运行了 MicroPython,你可以使用串口工具 screen 连接到 ESP32,并开始运行 MicroPython 命令.
将写好的 Python 程序刷入 ESP32 来运行并不是直接将 Python 代码烧写到 ESP32 的 flash 中的常规做法。相反,你首先将 MicroPython 烧写到 ESP32,然后将你的 Python 脚本上传到 ESP32 上的文件系统,并在那里运行它。以下是如何做到这一点的步骤:
ampy ampy 是 Adafruit 提供的一个工具,用于在与 MicroPython 兼容的设备上管理文件。你可以使用 pip 安装它:
pip install adafruit-ampy
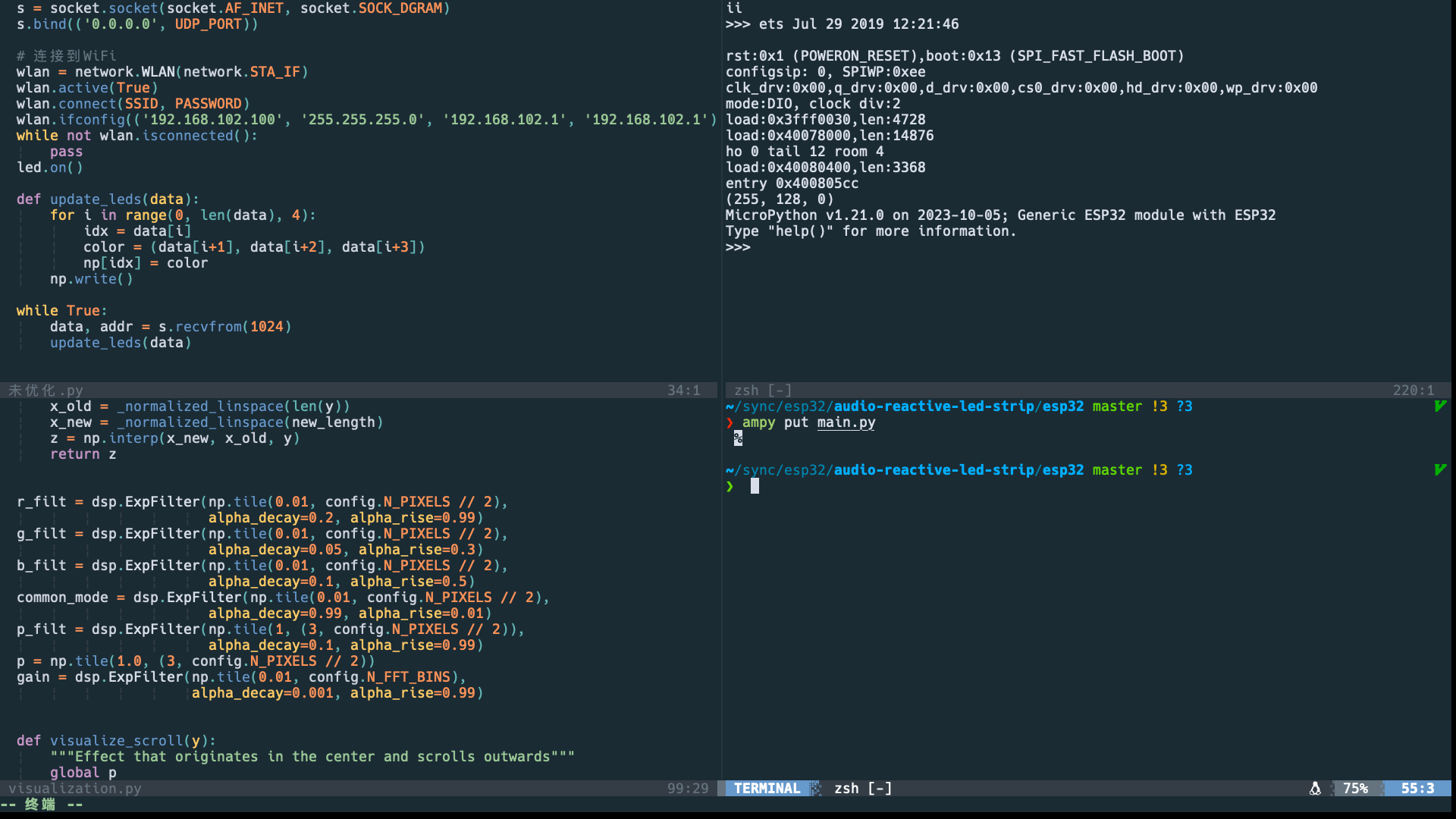
使用 ampy 将你的 Python 脚本放入 ESP32 的文件系统中。例如,假设你的脚本名为 main.py :
ampy --port <YOUR_PORT> put main.py
将 <YOUR_PORT> 替换为 ESP32 的串口名(如 /dev/ttyUSB0 ).
连接到 ESP32 的 REPL(Read-Evaluate-Print Loop):
在 Linux 或 macOS 上,你可以使用 screen
screen <YOUR_PORT> 115200 。
- `screen`基本使用
当你使用 `screen` 连接到一个串口或其他设备后,你可以按照以下步骤断开连接:
1. 按 `Ctrl` + `A` 键。这是 `screen` 的命令键。
2. 紧接着按 `k` 键。这将会提示你是否确定要杀死这个 `screen` 会话。
3. 最后,按 `y` 键确认。
这样就会结束 `screen` 会话并断开连接。
另外,你也可以按 `Ctrl` + `A` 然后按 `d` 键来"分离"一个 `screen` 会话,这样你可以在后台保留会话并返回到终端。要重新连接到这个会话,可以使用 `screen -r` 命令。
一旦连接,你应该能够看到 MicroPython 的提示符 `>>>`。要运行你刚刚上传的脚本,只需输入:
```Python
import main
注意:如果你的脚本名为 main.py ,ESP32 会在启动时自动运行它。如果你想要在设备启动时自动执行其他名称的脚本,你需要重命名该脚本为 main.py .
实例 main.py 使板子自带的灯呼吸闪烁 。
from machine import Pin, PWM
import time
# 使用 ESP32 的板载 LED。大多数 ESP32 开发板的板载 LED 连接到 GPIO2。
LED_PIN = 2
# 创建一个 PWM 对象
led = PWM(Pin(LED_PIN), freq=1000)
def breathe():
while True:
# 逐渐增加亮度
for duty in range(0, 1024, 10):
led.duty(duty)
time.sleep(0.05)
# 逐渐减少亮度
for duty in range(1023, -1, -10):
led.duty(duty)
time.sleep(0.05)
breathe()
使用ampy管理文件系统中的文件 。
ampy 是由 Adafruit 开发的一个工具,用于在与 MicroPython 兼容的板上管理文件。下面是如何使用 ampy 进行文件管理的常见命令:
要列出板上的所有文件,你可以使用 ls 命令:
ampy --port <YOUR_PORT> ls
要将文件上传到板上,使用 put 命令:
ampy --port <YOUR_PORT> put <LOCAL_FILE>
例如,要上传名为 main.py 的文件,使用:
ampy --port <YOUR_PORT> put main.py
要从板上读取文件并将其内容打印到终端,使用 get 命令:
ampy --port <YOUR_PORT> get <REMOTE_FILE>
如果你还想将其保存到本地文件,可以:
ampy --port <YOUR_PORT> get <REMOTE_FILE> <LOCAL_FILE>
要删除板上的文件,使用 rm 命令:
ampy --port <YOUR_PORT> rm <REMOTE_FILE>
要在板上创建目录,使用 mkdir 命令:
ampy --port <YOUR_PORT> mkdir <DIRECTORY_NAME>
你可以使用 run 命令来执行板上的 MicroPython 脚本并看到其输出:
ampy --port <YOUR_PORT> run <SCRIPT_NAME>
在使用 ampy 之前,确保已经断开了其他对板子的连接(例如 screen , picocom , 等),否则 ampy 可能无法与板子通讯.
<YOUR_PORT> 是你的设备连接的串口。例如 /dev/ttyUSB0 或 COM3 .
ampy 为管理 MicroPython 板上的文件提供了简单而直接的方法。如果你经常使用相同的串口,你也可以考虑在 .bashrc 或 .bash_profile 中设置 AMPY_PORT 环境变量,这样你就不必每次都指定 --port 参数了.
在 ESP32 上运行 MicroPython 时, boot.py 和 main.py 是两个特殊的文件,它们在启动过程中自动执行。它们之间的主要关系和区别如下:
boot.py : 当 ESP32 上的 MicroPython 被启动时,首先执行的是 boot.py 。它的主要目的是进行初始化操作,例如设置无线网络连接、配置一些硬件参数或其他任何需要在程序运行之前进行的设置.
main.py : 在 boot.py 执行完毕后, main.py 将被执行。这是你的主应用程序或脚本,通常用于运行你的项目的主要功能或代码.
boot.py : 由于它是首先执行的, boot.py 主要用于设置那些只需要配置一次的东西,如 Wi-Fi 设置或其他系统级初始化。在某些情况下,为了安全起见,你可能想在这里设置异常处理,以确保无论 main.py 中发生什么,都不会影响到系统的正常启动.
main.py : 这是你的主程序代码,可能包括处理循环、事件响应或任何你的项目需要的功能.
通过 screen 交互,通过 ampy 管理文件系统。enjoy it 。
最后此篇关于ESP32-MicroPythonwithoutThonny的文章就讲到这里了,如果你想了解更多关于ESP32-MicroPythonwithoutThonny的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
26
4
 0
0
why witout Thonny? 最近闲来在ESP32上用MicroPython捣鼓些小玩具,见很多教程推荐使用Thonny。欣然往之,竟是个这,实在不能认同。Thonny esp32

我是一名优秀的程序员,十分优秀!