
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 39
39
 4
4


参考: 李宏毅老师课件 。
PPO: Default reinforcement learning algorithm at OpenAI 。
PPO = Policy Gradient 从 On-policy 到 Off-policy, 再加一些constraint 。
Actor: 动作执行者(智能体) 。
Env: 环境 。
Reward Function: 奖励函数 。
Policy \(\pi\) : a network with parameter \(\theta\) . 。
Input: 当前的 Env. 。
Output: actor 要采取的下一个 action 的分布. 。
Trajectory \(\tau\) : 一系列的 Env 和 Action, \(\set{s_1,a_1,s_2,a_2, \dots}\) 在参数为 \(\theta\) 情况下, 发生 \(\tau\) 的概率: \(p_{\theta}(\tau)=p(s_1)p_{\theta}(a_1|s_1)p(s_2|s_1,a_1)p_{\theta}(a_2|s_2)\cdots\) 。
给定 \(\tau\) , 可以计算 \(\tau\) 的 reward, \({R(\tau)}\) . 。
对于参数为 \(\theta\) 的 Policy下, Trajectory \(\tau\) 是采样得到的, 因此实际上需要计算的是 reward 的期望值 \(\overline{R_\theta}\) . 我们希望 \(\overline{R_\theta}\) 越大越好. 。
Reward 的期望
求 \(\theta\) 的梯度
由 \(\nabla \log p_\theta(\tau)=\frac{\nabla p_\theta(\tau)}{p_\theta(\tau)}\) , 可得到第三行公式. 此处可延伸出一个公式
由 \(\sum_\tau p_\theta(\tau)f(\tau)=E_{\tau\sim p_\theta(\tau)}[f(\tau)]\) , 可得第四行 。
通过采样的方式估计期望值, 采样 \(N\) 个 Trajectory, 既第五行公式 。
最后将 \(p_\theta(\tau)\) 展开代入, 得第六行公式 。
最大化 Reward 的期望 \(\overline{R_\theta}\) , 由公式(2)中梯度的计算, 可以反推出目标函数在实现时定义如下
最大化 \(object\) 等价于最小化 \(loss\)
其中, \(a^n_t, s^n_t\) 是在参数为 \(\theta\) 的 policy 下采样得到的. 。
与交叉熵损失对比: 其实就是将采样得到的 \(a^n_t\) 视作grand truth计算交叉熵, 区别在于针对不同的 Trajectory \(\tau^n\) , 要多乘了一个 \(R(\tau^n)\) 。
\(R(\tau^n)\) 可能总为正数, 这样在 training时, 相当于告诉 model, 不论时什么action 都要将它的概率提升. 。
理想情况下, 这样是没有问题的, 因为 Reward 即使总是正的, 也有大有小. 。
当时实际上, action 是采样得到的, 这会导致如果有的 action 没有被采样到, 它的概率相对于被采样到的 action 就会下降, 而这时, 并不能表示当前环境下采取这个 action 不好. 。
改进: 减去一个 baseline, \(b\) . 。
再来看一下目标函数
对于同一个 Trajectory \(\tau\) 中, 针对每个状态 \(s\) 下, 执行 动作 \(a\) , 都有相同的 Reward 系数. 这是不合理的. 例如图的左边, 在 \(s_b\) 执行 \(a_2\) 不是一个好的选择, 他会导致接下来进入 \(s_c\) , 并执行 \(a_3\) , 得到 -2 分. 由此, 提出改进1. 。
改进1: 每个时刻的 reward 改为, 当前时刻到结束时刻的 reward 的总和 。
某时刻的 action, 经过越长时间, 它的影响力就越小. 也就是与该 action 间隔很久的 reward 与该 action 的关系很小. 由此提出改进2. 。
改进2: 加一个衰减系数. 。
最后, 将整个系数项称为 Advantage Function, \(A^\theta(s_t, a_t)\) .其含义为, 在某 state 下, \(a_t\) 相较于其他的 action, 有多好. (这个 \(A\) , 通常可以是用一个网络来预测的 ???) 。
最终, 得梯度公式
梯度计算公式
目前为止的做法其实是一种 on-policy 的方法
目标是: 从另一个 policy, \(\pi_{\theta'}\) 中采样数据, 用来训练 \(\pi_\theta\) . 这样就可以重复利用这些采样得到的数据. 。
\(x\) 服从 \(p\) 分布时, 计算 \(f(x)\) 期望 \(E_{x\sim p}[f(x)]\) 的做法: 一般是从 \(p\) 中采样一些 \(x\) , 带入 \(f(x)\) 求平均, 用这个值来估计所求期望. 。
现在, 假设无法从 \(p\) 中直接采样 \(x\) , 但可以从另一个分布 \(q\) 中采样 \(x\) . 可以对 \(E_{x\sim p}[f(x)]\) 做如下变形
这样, 我们就可以用 \(q\) 中采样的数据来估计期望值 \(E_{x\sim p}[f(x)]\) . 这就是 Importance Sampling. 。
Issue of Importance Sampling 理论上, 我们已经得出两个期望值是相等的
那么它们的方差是否相等呢? \(Var_{x\sim p}[f(x)] == Var_{x\sim q}[f(x)\frac{p(x)}{q(x)}] ?\) 。
由公式 。
可以得出
对比发现, 第一项中后者比前者多乘了一个 \(\frac{p(x)}{q(x)}\) , 也就是说当 \(p\) 与 \(q\) 相差很多时, 它们的方差也会差很多. 。
这样就会出现一问题: 理论上, 无论 \(p,q\) 的分布是什么样的, 当我们从 \(p\) 和 \(q\) 采样足够多次时, 是可以得到 \(E_{x\sim p}[f(x)] = E_{x\sim q}[f(x)\frac{p(x)}{q(x)}]\) 的. 但是当 \(p,q\) 差距过大, 而我们采样的次数又不够多时, 因为它们之间的方差差距很大, 所以最后很可能导致期望差距很大. 。
一个直观的例子: 图中 \(p,q\) 两个分布的差异很大. 。
当我们采样次数不够多, 导致没有采样到最左边那个样本时, 就会出现实际上 \(E_{x\sim p}[f(x)]\) 应是一个负值, 但我们用 \(E_{x\sim q}[f(x)\frac{p(x)}{q(x)}]\) 计算出来的却是一个正值. 。
而当我们采样到最左边那个样本时, 因为此时 \(\frac{p(x)}{q(x)}\) 的值将会非常大, 所以可以把 \(E_{x\sim q}[f(x)\frac{p(x)}{q(x)}]\) 拉回负值. 。
将 Importance Sampling 用在 policy gradient 中, 我们就可以得到
这样, 我们就可以从 \(\theta'\) 中采样数据, 然后多次利用这些数据来更新 \(\theta\) . 。
结合公式(7), 得 。
再由公式(3)得
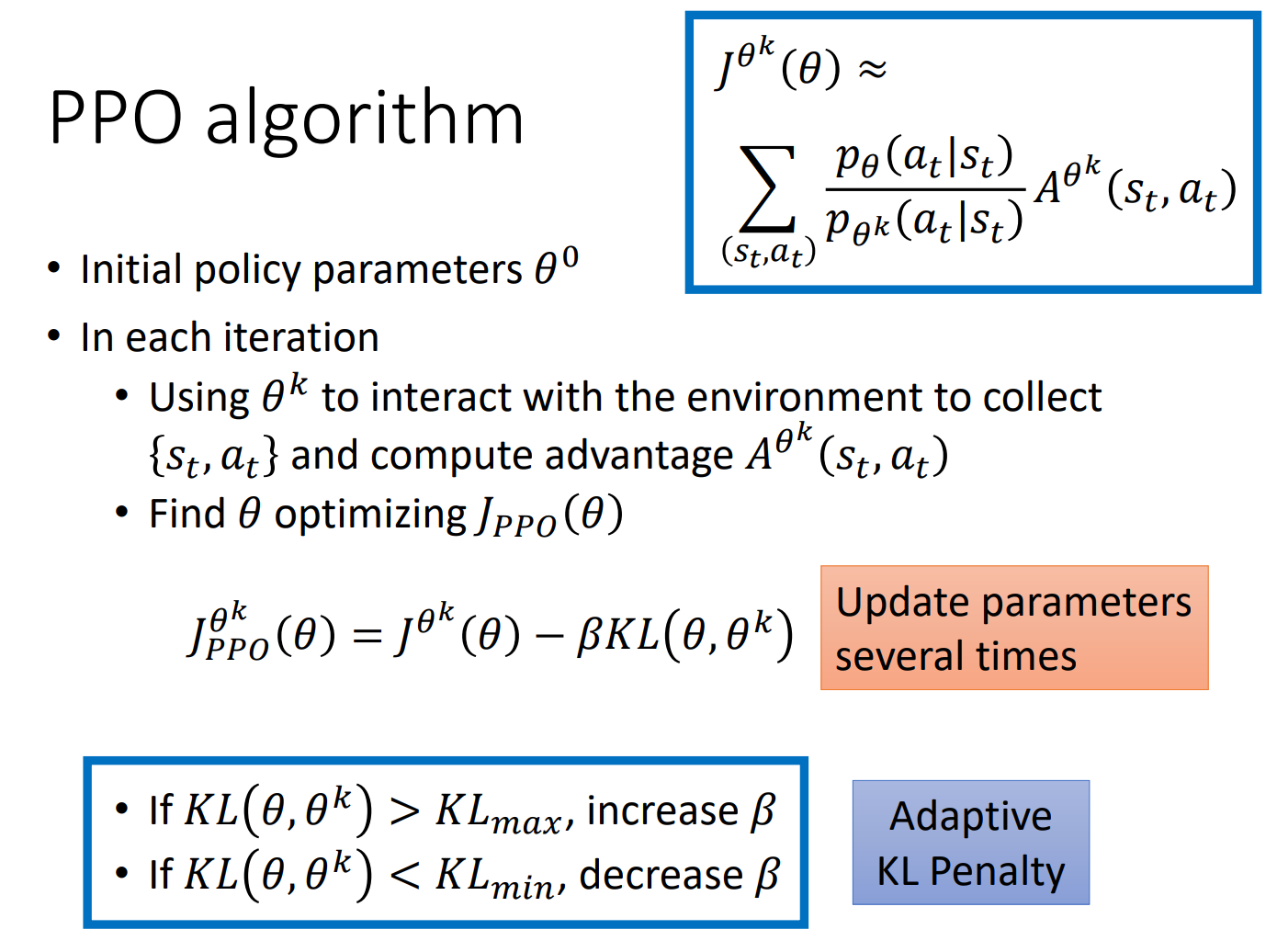
反推目标函数
目前为止, 我们利用 Importance Sampling 完成了 Policy Gradient 从 On-policy 到 Off-policy 的优化. 。
但是 Importance Sampling 在实际应用中有一个不得不考虑的限制, 就是我们无法保证能采样足够多的数据, 这时当两个分布 \(p_\theta, p_{\theta'}\) 差异过大时, 难以保证期望相等. 。
PPO做的事情, 简单说就是, 限制两个分布 \(p_\theta, p_{\theta'}\) 不能差太多. 。
注: 此处 KL 散度指的不是将两个模型的参数看作分布,拉近两个模型的参数的距离. 而是两个模型行为上的距离, 就是当两个模型输入同样的 state 时, 希望输出的 action 的分布尽可能像 。
PPO2: 简化 PPO 的计算. 首先, 我们将横坐标 \(x\) 设为 \(\frac{p_\theta(a_t|s_t)}{p_{\theta^k}(a_t|s_t)}\) , 则函数 \(y=x\) 与 \(y=clip(x, 1-\epsilon, 1+\epsilon)\) 的图像分别为图中的绿线和蓝线. 其中, \(clip(x, a, b)=\left\{\begin{aligned}a,\quad &x\le a\\ x, \quad &a<x<b\\ b, \quad &x \ge b\end{aligned}\right.\) 。
目的依旧是保证两个分布 \(p_\theta, p_{\theta^k}\) 差距不能过大. 。
最后此篇关于强化学习ProximalPolicyOptimization(PPO)的文章就讲到这里了,如果你想了解更多关于强化学习ProximalPolicyOptimization(PPO)的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
39
4
 0
0

我是一名优秀的程序员,十分优秀!