
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 27
27
 4
4


利用4B树莓派控制步进电机转动,精度可达:0.0144度 (即360度/25000) 。
适用于非常精密的角度转动.
舵机的精度为1度,无法实现超高精度控制.
硬件型号不同,只要功能相同,代码即可兼用.

概述:
用户使用该驱动器可以设置常用的 8 档电流以及 16 档细分,能够满足大多数场合的应用需要。低中高速运 行都很平稳,噪音小。多种功能可通过外部拨码选择,极大地方便了客户的应用.
应用领域:
适合各种中小型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图 仪、数控机床、自动装配设备等.
电气指标:
控制信号接口:
强电接口:
控制信号时序图:
每转脉冲设定:
工作电流设定:
采用 90-264VAC 全范围输入电压,(200W、350W 有拨动开关选择)。可任选一组 5V、12V、24V、36V、48V 单组输出 。

电气指标:
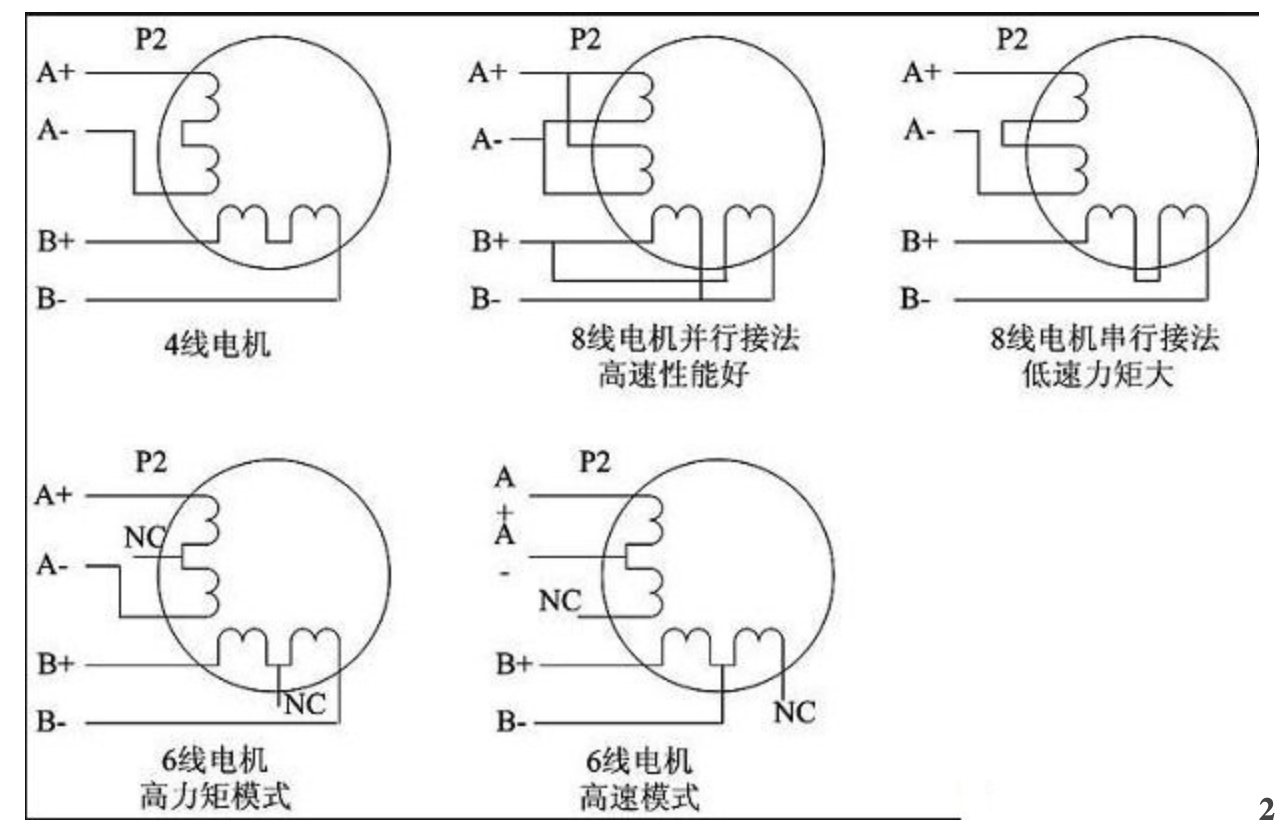
电机接口:
控制信号时序图:
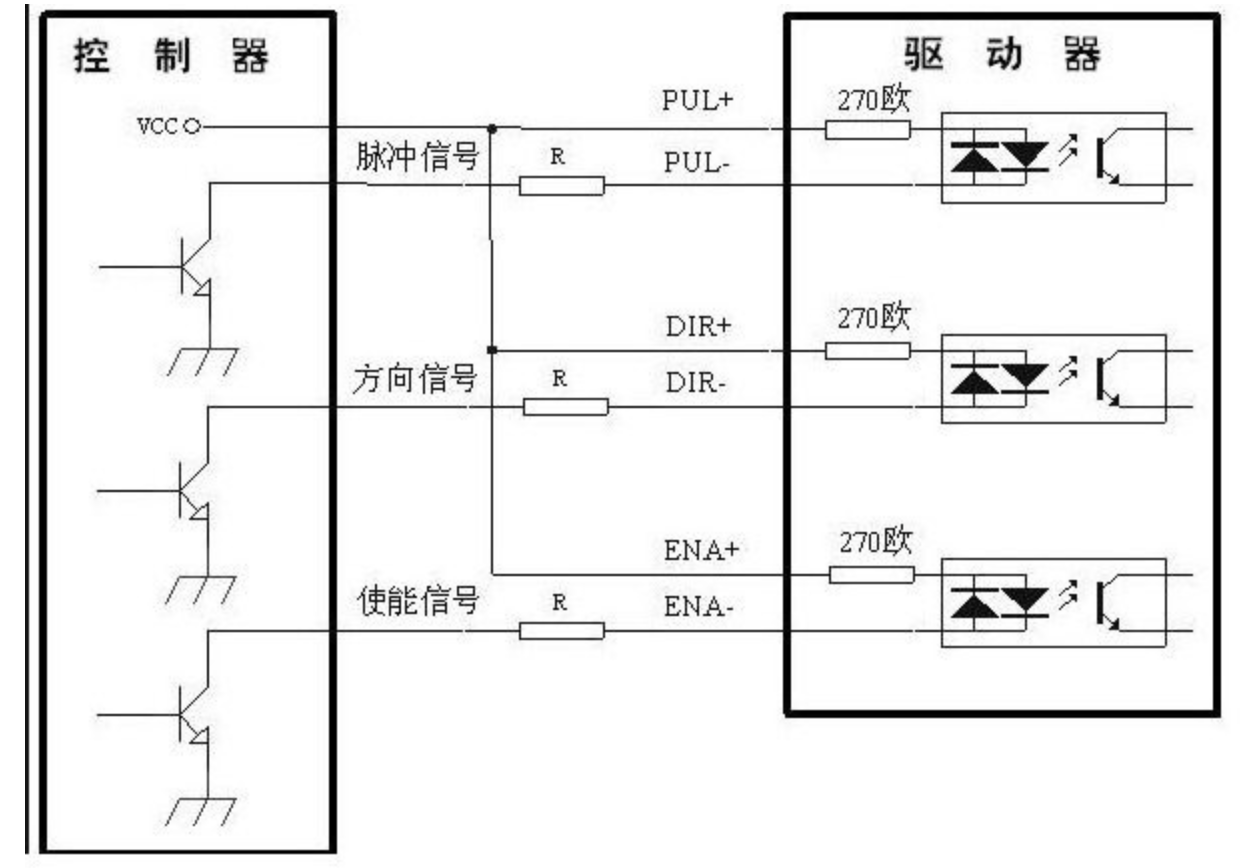

树莓派GPIO接口和驱动器的接线方式:
IN1 = 18 # 接PUL- IN2 = 16 # 接PUL+ IN3 = 15 # 接DIR- IN4 = 13 # 接DIR+ 。
步进电机和驱动器的接线方式:
按照步进电机上的A+、A-等连到驱动器对应位置即可(驱动器上有电机接口标签) 。
开关电源和220V插头接线方式:
220V插头接开关电源的220V输入电压位置,开关电源的V-和V+接驱动器的输入电源位置 。
驱动器细分按键调节:
SW1、SW2、SW3、SW6开关设置为on 。
import RPi.GPIO as GPIO
import time
# 规定GPIO引脚
IN1 = 18 # 接PUL-
IN2 = 16 # 接PUL+
IN3 = 15 # 接DIR-
IN4 = 13 # 接DIR+
def setStep(w1, w2, w3, w4):
GPIO.output(IN1, w1)
GPIO.output(IN2, w2)
GPIO.output(IN3, w3)
GPIO.output(IN4, w4)
def stop():
setStep(0, 0, 0, 0)
def backward(delay, steps):
for i in range(0, steps):
setStep(1, 0, 0, 0)
time.sleep(delay)
setStep(0, 1, 0, 0)
time.sleep(delay)
setStep(0, 0, 1, 0)
time.sleep(delay)
setStep(0, 0, 0, 1)
time.sleep(delay)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(IN1, GPIO.OUT) # Set pin's mode is output
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
def loop(angle):
print ("backward...")
backward(0.0001, int(angle/0.036)) # 发射脉冲时间间隔0.0001(单位秒) 脉冲个数angle/0.036
print ("stop...")
stop() # stop
time.sleep(1) # sleep 3s
def destroy():
GPIO.cleanup() # 释放数据
if __name__ == '__main__': # Program start from here
setup()
while True:
try:
a = input("please input angle:")
loop(float(a))
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child function destroy() will be executed.
destroy()
此代码的精度为:0.036度 。
如果希望精度更高,自行调整代码和驱动器细分按键.
最后,祝大家学习进步,工作顺心! 。
最后此篇关于树莓派4B-细分驱动步进电机的文章就讲到这里了,如果你想了解更多关于树莓派4B-细分驱动步进电机的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
27
4
 0
0
我有两种结构,Header 和Session,它们都符合协议(protocol)TimelineItem。 我有一个 Array 由 TimelineItem 组成,如下所示: [Header1, S
这个问题在这里已经有了答案: Multiple assignment and evaluation order in Python (11 个答案) 关闭 6 年前。 我刚接触python所以想问你
我试图找到一种方法来在 R 中获取 A、A、A、A、B、B、B、B、B 的所有可能的唯一排列的列表。 组合最初被认为是获得解决方案的方法,因此组合的答案。 最佳答案 我认为这就是你所追求的。 @bil
我怎样才能将两个给定的向量混合成一个新的向量,它以交替的顺序保存它们的值。 (f [a a] [b b]) ; > [a b a b] 这是我想到的: (flatten (map vector [:a
这是我的第一个问题,我开始学习Python。之间有区别吗: a, b = b, a + b 和 a = b b = a + b 当您在下面的示例中编写它时,它会显示不同的结果。 def fib(n):
这个问题在这里已经有了答案: Why is there an injected class name? (1 个回答) 12 个月前关闭。 我不知道如何解释: namespace A { struct
我尝试了一些代码来交换 Java 中的两个整数,而不使用第三个变量,使用 XOR。 这是我尝试过的两个交换函数: package lang.numeric; public class SwapVars
假设类 B 扩展类 A,并且我想为 B 声明一个变量。什么更有效?为什么? B b或 A b . 最佳答案 您混淆了两个不同的概念。 class B extends A { } 意味着B 是 A .
我不确定这个问题的标题是什么,这也可能是一个重复的问题。所以请相应地指导。 我是 python 编程的新手。我有这个简单的代码来生成斐波那契数列。 1: def fibo(n): 2: a =
我在谷歌上搜索了有关 dynamic_cast 的内容,我发现显式地将基类对象转换为派生类指针可能是不安全的。但是当我运行一些示例代码来检查它时,我没有收到任何错误。请在下面找到我的代码: class
这个问题在这里已经有了答案: What is this weird colon-member (" : ") syntax in the constructor? (14 个答案) 关闭 8 年前。
在不重现产生非整数值的表达式的情况下实现以下目标的惯用方法是什么(在我的真实情况下,该值是在我不想重现的冗长查询之后计算为百分比的): SELECT * FROM SomeTable WHERE 1/
在析构中,这两个代码的结果确实不同。我不确定为什么。 提示说 const [b,a] = [a,b] 将导致 a,b 的值为 undefined (从左到右的简单分配规则)。我不明白为什么会这样。 l
C++ Templates - The Complete Guide, 2nd Edition介绍max模板: template T max (T a, T b) { // if b < a th
我最近开始学习代码(Java),并根据第 15.17.3 节在 Oracle 网站上查找了模运算符。以下链接: http://docs.oracle.com/javase/specs/jls/se8/
无法理解以下行为。 d1 := &data{1}; 的区别d1 和 d2 := 数据{1}; &d1。两者都是指针,对吧?但他们的行为不同。这里发生了什么 package main import "f
这个问题在这里已经有了答案: How to make loop infinite with "x = y && x != y"? (4 个回答) How can i define variables
在我的程序中,当我调试我的代码时,它似乎在我生成的代码中的某处 X1=['[a,a,a]','[b,b,b]'] 还有我生成的其他地方 X2=[[a,a,a],[b,b,b]] 当我想添加这两个列表然
我试图使用递归将两个整数相乘,并意外编写了这段代码: //the original version int multiply(int a, int b) { if ( !b ) retu
我有一个列表中数字之间所有可能的操作组合: list = ['2','7','8'] 7+8*2 8+7*2 2*8+7 2+8*7 2-8*7 8-2/7 etc 我想知道是否可以说像 ('7*2+

我是一名优秀的程序员,十分优秀!