
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 26
26
 4
4


绘制魔方 中基于OpenGL ES 实现了魔方的绘制,实现较复杂,本文基于 Unity3D 实现了 2 ~ 10 阶魔方的整体旋转和局部旋转.
本文完整代码资源见→ 基于 Unity3D 的 2 ~ 10 阶魔方实现 。下载资源后,进入【Build/Windows】目录,打开【魔方.exe】文件即可体验产品.
详细需求如下:
1)魔方渲染模块 。
2)魔方整体控制模块 。
3)魔方局部控制模块 。
4)魔方动画模块 。
5)魔方撤销和逆撤销模块 。
6)其他模块 。
选择阶数界面如下:
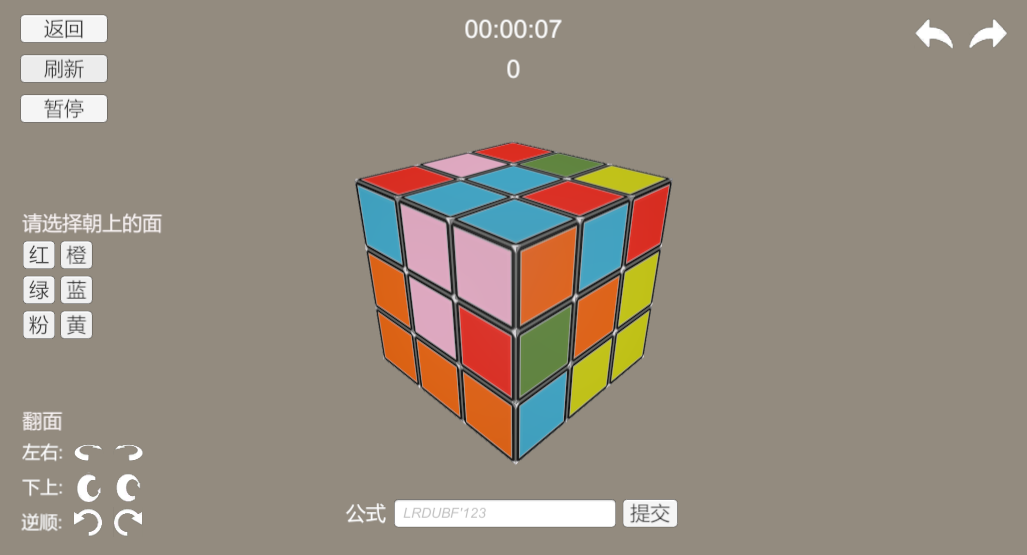
魔方界面如下:
为方便计算,需要对魔方的轴、层序、小立方体、方块、旋转层进行编码,编码规则如下(假设魔方阶数为 n):
在 Hierarchy 窗口新建一个空对象,重命名为 Cube,在 Cube 下创建 6 个 Quad 对象,分别重命名为 0 (x = -0.5)、1 (x = 0.5)、2 (y = -0.5)、3 (y = 0.5)、4 (z = -0.5)、5 (z = 0.5) (方块的命名标识了魔方所属的面,在魔方还原检测中会用到),调整位置和旋转角度,使得它们围成一个小立方体,将 Cube 拖拽到 Assets 窗口作为预设体.
在创建一个 n 阶魔方时,新建一个空对象,重命名为 Rubik,复制 n^3 个 Cube 作为 Rubik 的子对象,调整所有 Cube 的位置使其拼成魔方结构,根据立方体和方块位置,为每个方块设置纹理图片,如下:

说明:对于任意小方块 Square,Square.forward 始终指向小立方体中心,该结论在旋转层检测中会用到;Inside.png 为魔方内部色块,用粉红色块代替白色块是为了凸显白色线框.
每个小立方体的贴图代码如下:
Cube.cs 。
private void GetTextures()
{ // 获取纹理
textures = new Texture[COUNT];
for (int i = 0; i < COUNT; i++)
{
textures[i] = RubikRes.INSET_TEXTURE;
squares[i].name = "-1";
}
for(int i = 0; i < COUNT; i++)
{
int axis = i / 2;
// loc为小立方体的位置序号(以魔方的左下后为坐标原点, 向右、向上、向前分别为x轴、y轴、z轴, 小立方体的边长为单位刻度)
if (loc[axis] == 0 && i % 2 == 0 || loc[axis] == Rubik.Info().order - 1 && i % 2 == 1)
{
textures[i] = RubikRes.TEXTURES[i];
squares[i].name = i.ToString();
}
squares[i].GetComponent<Renderer>().material.mainTexture = textures[i];
}
}
通过调整相机前进和后退,控制魔方放大和缩小;通过调整相机的位置和姿态,使得相机绕魔方旋转,实现魔方整体旋转。详情见 缩放、平移、旋转场景 .
使用相机绕魔方旋转以实现魔方整体旋转的好处主要有:
用户翻面、选择朝上的面等整体旋转操作,会改变魔方的正面、右面、上面(即魔方朝上的面不一定是蓝色面、朝右的面不一定是橙色面、朝前的面不一定是粉色面),用户视觉下魔方的 x、y、z 轴也会发生变化。假设魔方的 x、y、z 轴正方向单位向量为 ox、oy、oz,用户视觉下魔方的 x、y、z 轴正方向单位向量为 ux、uy、uz,相机的 right、up、forward 轴正方向单位向量分别为 cx、cy、cz,则 ux、uy、uz 的取值满足以下关系:

相关代码如下:
AxisUtils.cs 。
using UnityEngine;
/*
* 坐标轴工具类
* 坐标轴相关计算
*/
public class AxisUtils
{
private static Vector3[] worldAxis = new Vector3[] { Vector3.right, Vector3.up, Vector3.forward }; // 世界坐标轴
public static Vector3 Axis(int axis)
{ // 获取axis轴向量
return worldAxis[axis];
}
public static Vector3 NextAxis(int axis)
{ // 获取axis的下一个轴向量
return worldAxis[(axis + 1) % 3];
}
public static Vector3 Axis(Transform trans, int axis)
{ // 获取trans的axis轴向量
if (axis == 0)
{
return trans.right;
}
else if (axis == 1)
{
return trans.up;
}
return trans.forward;
}
public static Vector3 NextAxis(Transform trans, int axis)
{ // 获取trans的axis下一个轴向量
return Axis(trans, (axis + 1) % 3);
}
public static Vector3 FaceAxis(int face)
{ // 获取face面对应的轴向量
Vector3 vec = worldAxis[face / 2];
if (face % 2 == 0)
{
vec = -vec;
}
return vec;
}
public static Vector3 GetXAxis()
{ // 获取与相机right轴夹角最小的世界坐标轴
return GetXAxis(Camera.main.transform.right);
}
public static Vector3 GetYAxis()
{ // 获取与相机up轴夹角最小的世界坐标轴
return GetYAxis(Camera.main.transform.up);
}
public static Vector3 GetZAxis()
{ // 获取与相机forward轴夹角最小的世界坐标轴
return GetZAxis(Camera.main.transform.forward);
}
public static Vector3 GetXAxis(Vector3 right)
{ // 获取与right向量夹角最小的世界坐标轴
int x = GetZAxisIndex(right);
Vector3 xAxis = worldAxis[x];
if (Vector3.Dot(worldAxis[x], right) < 0)
{
xAxis = -xAxis;
}
return xAxis;
}
public static Vector3 GetYAxis(Vector3 up)
{ // 获取与up向量轴夹角最小的世界坐标轴
int y = GetZAxisIndex(up);
Vector3 yAxis = worldAxis[y];
if (Vector3.Dot(worldAxis[y], up) < 0)
{
yAxis = -yAxis;
}
return yAxis;
}
public static Vector3 GetZAxis(Vector3 forward)
{ // 获取与forward向量夹角最小的世界坐标轴
int z = GetZAxisIndex(forward);
Vector3 zAxis = worldAxis[z];
if (Vector3.Dot(worldAxis[z], forward) < 0)
{
zAxis = -zAxis;
}
return zAxis;
}
public static int GetAxis(int flag)
{ // 根据flag值, 获取与相机坐标轴较近的轴
if (flag == 0)
{
return GetXAxisIndex(Camera.main.transform.right);
}
if (flag == 1)
{
return GetXAxisIndex(Camera.main.transform.up);
}
if (flag == 2)
{
return GetXAxisIndex(Camera.main.transform.forward);
}
return -1;
}
private static int GetXAxisIndex(Vector3 right)
{ // 获取与right向量夹角最小的世界坐标轴索引
float[] dot = new float[3];
for (int i = 0; i < 3; i++)
{ // 计算世界坐标系的坐标轴在相机right轴上的投影
dot[i] = Mathf.Abs(Vector3.Dot(worldAxis[i], right));
}
int x = 0;
if (dot[x] < dot[1])
{
x = 1;
}
if (dot[x] < dot[2])
{
x = 2;
}
return x;
}
private static int GetYAxisIndex(Vector3 up)
{ // 获取与up向量轴夹角最小的世界坐标轴索引
float[] dot = new float[3];
for (int i = 0; i < 3; i++)
{ // 计算世界坐标系的坐标轴在相机up轴上的投影
dot[i] = Mathf.Abs(Vector3.Dot(worldAxis[i], up));
}
int y = 1;
if (dot[y] < dot[2])
{
y = 2;
}
if (dot[y] < dot[0])
{
y = 0;
}
return y;
}
private static int GetZAxisIndex(Vector3 forward)
{ // 获取与forward向量夹角最小的世界坐标轴索引
float[] dot = new float[3];
for (int i = 0; i < 3; i++)
{ // 计算世界坐标系的坐标轴在相机forward轴上的投影
dot[i] = Mathf.Abs(Vector3.Dot(worldAxis[i], forward));
}
int z = 2;
if (dot[z] < dot[0])
{
z = 0;
}
if (dot[z] < dot[1])
{
z = 1;
}
return z;
}
}
首先生成 24 个视觉方向(6 个面,每个面 4 个视觉方向),如下(不同颜色的线条代表该颜色的面对应的 4 个视觉方向),记录相机在这些视觉方向下的 forward 和 right 向量,分别记为:forwardViews、rightViews(数据类型:Vector3[6][4]).
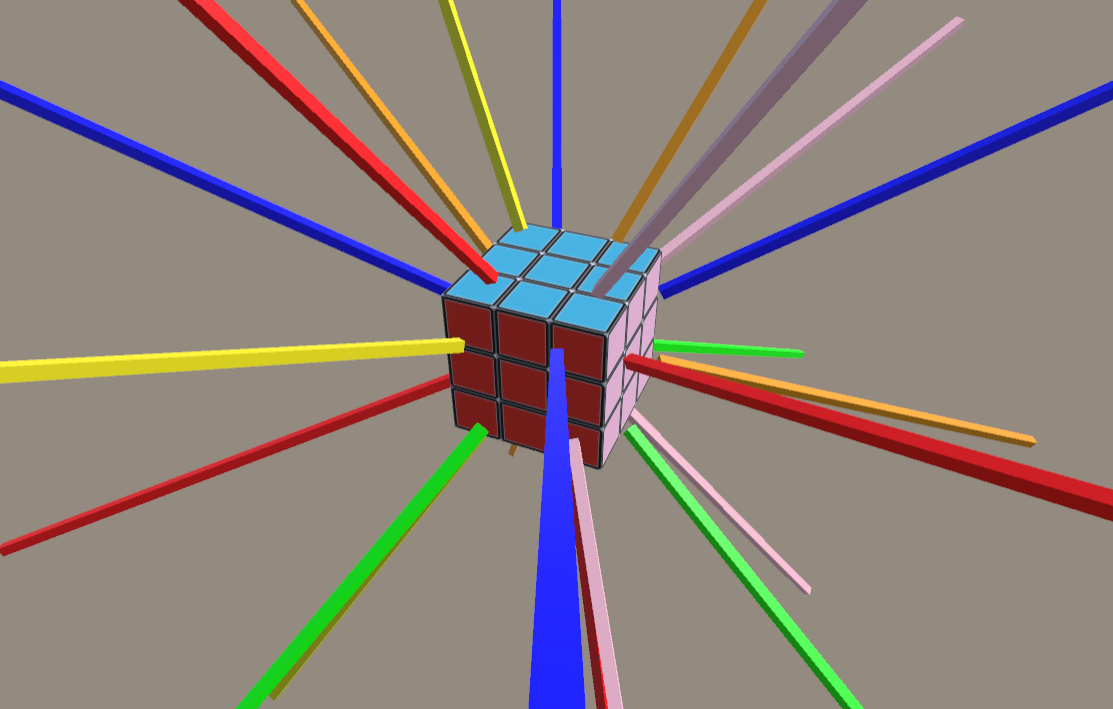
当选择 face 面朝上时,需要在 forwardViews[face] 的 4 个向量中寻找与相机的 forward 夹角最小的向量,记该向量的索引为 index,旋转相机,使其 forward 和 right 分别指向 forwardViews[face][index]、rightViews[face][index].
1 )旋转轴检测 。
假设屏幕射线检测到的两个相邻方块分别为 square1、square2.
假设叉乘后的向量的单位向量为 crossDir,我们将 crossDir 与 3 个坐标轴的单位方向向量进行点乘(记为 project),如果 Abs(project) > 0.99(夹角小于 8°),就选取该轴作为旋转轴,如果每个轴的点乘绝对值结果都小于 0.99,说明屏幕射线拾取的两个方块不在同一旋转层,舍弃局部旋转。补充:project 在 3)中会再次用到.
2 )层序检测 。
坐标分量与层序的映射关系如下,其中 order 为魔方阶数,seq 为层序,pos 为坐标分量,cubeSide 为小立方体的边长。由于频繁使用到 pos 与 seq 的映射,建议将 0 ~ (order-1) 层的层序 seq 对应的 pos 存储在数组中,方便快速查找.
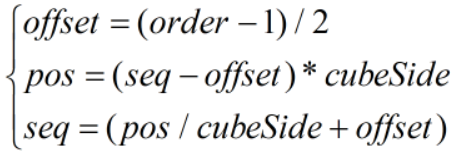
square1 与 square2 在旋转轴方向上的坐标分量一致,假设为 pos(如果旋转轴是 axis,pos = square1.position[axis]),由上述公式就可以推导出层序 seq.
3)拖拽正方向 。
拖拽正方向用于确定局部旋转的方向,计算如下,project 是 1)中计算的点乘值.
SquareUtils.cs 。
private static Vector2 GetDragDire(Transform square1, Transform square2, int project)
{ // 获取局部旋转拖拽正方向的单位方向向量
Vector2 scrPos1 = Camera.main.WorldToScreenPoint(square1.position);
Vector2 scrPos2 = Camera.main.WorldToScreenPoint(square2.position);
Vector2 dire = (scrPos2 - scrPos1).normalized;
return -dire * Mathf.Sign(project);
}
1)待旋转的小立方体检测 。
对于每个小立方体,使用数组 loc[] 存储了小立方体在 x、y、z 轴方向上的层序,每次旋转结束后,根据小立方体的中心坐标可以重写计算出 loc 数组(3.6 节中公式).
假设检测到的旋转轴为 axis,旋转层为 seq,所有 loc[axis] 等于 seq 的小立方体都是需要旋转的小立方体.
2)局部旋转 。
在 Rubik 对象下创建一个空对象,重命名为 RotateLayer,将 RotateLayer 移至坐标原点,旋转角度全部置 0.
将处于旋转层的小立方体的 parent 都设置为 RotateLayer,对 RotateLayer 进行旋转,旋转结束后,将这些小立方体的 parent 重置为 Rubik,RotateLayer 的旋转角度重置为 0,根据小立方体中心的 position 更新 loc 数组.
对于魔方的每个面,通过屏幕射线射向每个 Square 的中心,获取检测到的 Square 的 name,如果存在两个 Square 的 name 不一样,则魔方未还原,否则继续检测下一个面,如果每个面都还原了,则魔方已还原.
SuccessDetector.cs 。
public void Detect()
{ // 检测魔方是否已还原
for (int i = 0; i < squareRays.squareRays.Length - 1; i++)
{ // 检测每个面(只需检查5个面)
string name = GetSquareName(i, 0);
for (int j = 1; j < squareRays.squareRays[i].Length; j++)
{ // 检测每个方块
if (!name.Equals(GetSquareName(i, j)))
{
return;
}
}
}
Success();
}
private string GetSquareName(int face, int index)
{ // 获取方块名
if (Physics.Raycast(squareRays.squareRays[face][index], out hitInfo))
{
return hitInfo.transform.name;
}
return "-1";
}
说明:squareRays 里存储了每个方块对应的射线,这些射线由方块的外部垂直指向方块中心.
1)2 ~ 10 阶魔方渲染效果 。
2)魔方打乱动画 。
说明:在打乱的过程中可以缩放和整体旋转,体现了局部控制和整体控制相互独立,互不干扰.
3)按钮翻面动画 。
4)Ctrl + Drag 翻面动画 。
5)选择朝上的面动画 。
6)局部旋转动画 。
7)公式控制局部旋转动画 。
说明:在公式执行过程中,不影响魔方的整体旋转和缩放.
8)通关动画 。
声明:本文转自 【Unity3D】魔方 。
最后此篇关于【Unity3D】魔方的文章就讲到这里了,如果你想了解更多关于【Unity3D】魔方的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
26
4
 0
0
1 需求实现 绘制魔方 中基于OpenGL ES 实现了魔方的绘制,实现较复杂,本文基于 Unity3D 实现了 2 ~ 10 阶魔方的整体旋转和局部旋转。 本文完整代码资源
很难说出这里要问什么。这个问题模棱两可、含糊不清、不完整、过于宽泛或夸夸其谈,无法以目前的形式得到合理的回答。如需帮助澄清此问题以便重新打开,visit the help center . 关闭 1
这是一道算法题。我似乎无法找到一种方法来比较 rubix 立方体中 2 个立方体的相对位置。 我已经在我的程序中对所有 20 个立方体进行了编号。我正在使用他们的坐标系,但现在我想在相对位置对两个立方
如标题所示,我从 Eclipse 和 cmd 命令运行我的 Magic Square 程序时得到了不同的结果。 eclipse 没有意义。 (eclipse中“Wrong number...”这句话的
这与我问过的另一个问题有关,但现在我已经走得更远了。我正在尝试创建一个 Magic Square基于文本文件输入的程序。该程序将读取第一个方 block ,然后为其余方 block 打印出乱码。如果有

我是一名优秀的程序员,十分优秀!