
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 47
47
 4
4


。
目前主要的测距方式有:光学测距,超声波和微波雷达测距.
光学测距又可以分为:双目,结构光, ToF 。微波雷达,在消费类产品中,常见的是波长在毫米级别的毫米波雷达。超声波应用比较多的是在车载倒车雷达上.
它们各有优缺点,本章内容只针对在户外低功耗场景的应用做分析.
市面上已有的类似方案:视频桩,路牙机 。
对市场需求进行进一步分析,可以梳理出下面几个比较具体的产品需求
光学测距,主要有 双目,结构光和ToF 三个技术方向.
结构光和双目都属于3D视觉技术,不但可以检测出距离,还可以输出速度,形状等信息.
ToF模块也有3D的,但如果只要检测距离,不用测量速度和判断物体形状,1D ToF就可以满足需求了.
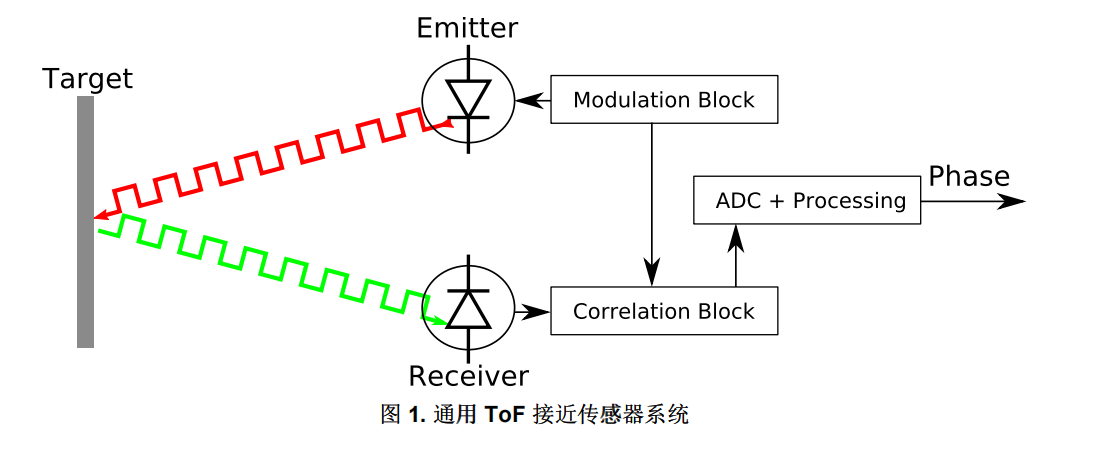
ToF测距基本原理: ToF模块发射端将调制后的红外光发送出去,接收端接收到反射回来的光,通过发送与反射回来光束的时间差或是相位差得到光飞行的时间。根据光的传播速度,结合检测到的飞行时间,可以计算出光传播的距离,从而知道模块距离被测试物体的距离.
ToF 细分之下,又分两种类型, iToF 和 dToF 。
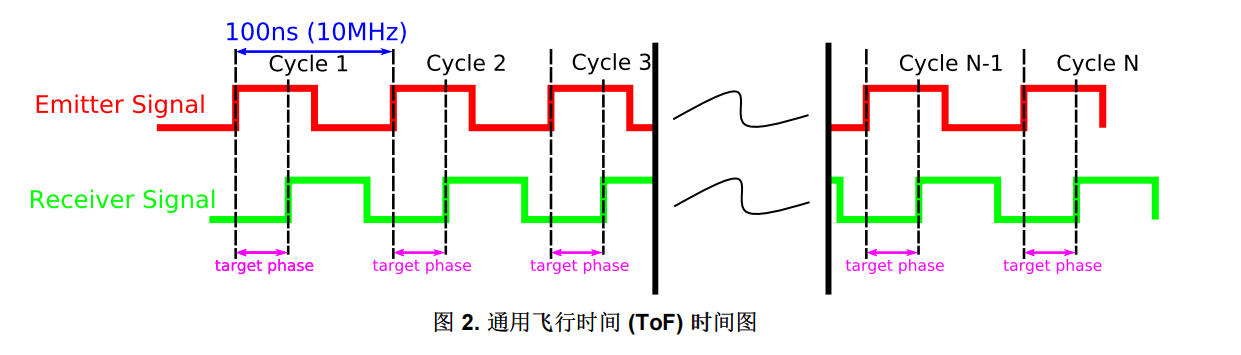
将调制后的光发送出去,接收端接收到后,解析出接收到光束的相位,将它与发送时的相位进行对比,间接计算出光的传播时间,从而得到距离值.
TI 的 OPT3101 采用的就是 iToF 方式.
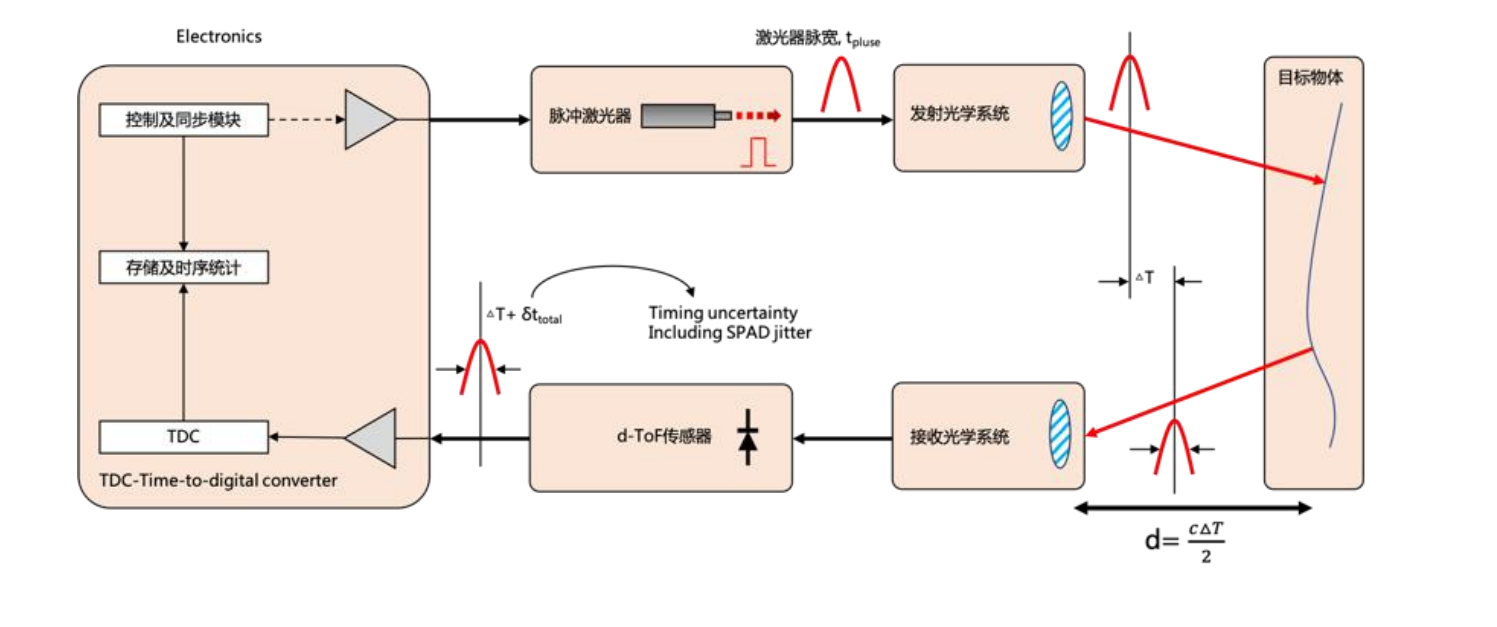
相比于 iToF 通过相位间接得到飞行时间, dToF 是通过发送时刻与接收时刻的时间差直接得到飞行时间,汐映微 用在扫地机器人上的CS10-S2A 就是使用的dToF技术。系统框图如下:
适用于冬季温度在-20°C以上地区,因为低温环境下, ToF 模块的时钟精度会下降,导致测量距离不准。另外光学器件灵敏度下降,会导致一些非线性的错误结果,还有可能出现启动不了的情况.
适用于安装在距离地面比较高的位置,并且模块上方有遮雨的结构设计。镜头有水,或者是镜头沾污,会影响模块性能.
适用于没有阳光直射或是其它光干扰环境。目前使用比较多的ToF模块,激光波长在800~950nm 的范围。太阳光直射,容易导致感光元器件过曝。如果有波长为800~950nm的其它光源,比如车灯,路灯,会对模块造成干扰.
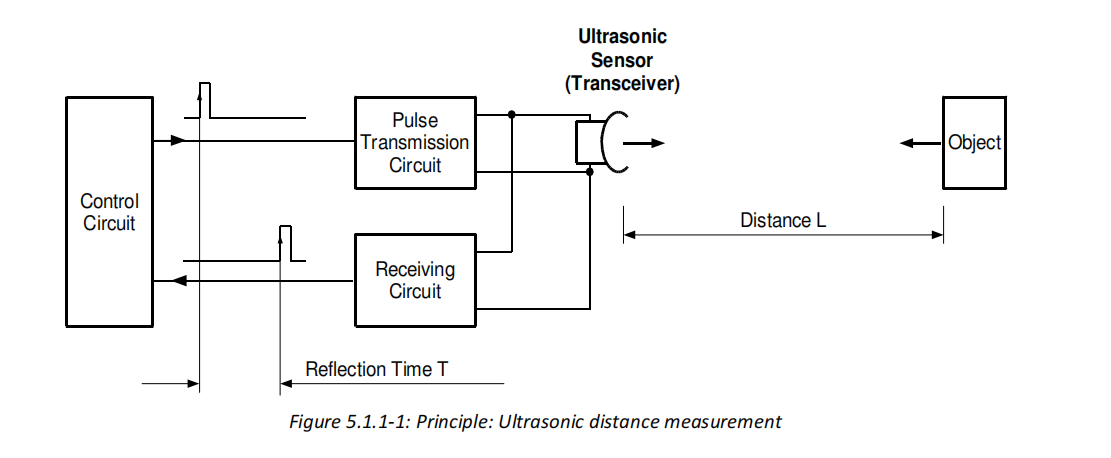
超声波测距,目前应用得最多的是在倒车雷达上,在近距离测距上使用非常多。一般人能听到的声波频率范围是20Hz~20Khz,低于20hz的我们叫次声波,高于20Khz,我们叫超声波.
超声波测距的基本原理是:将固定频率的声波发射出去,然后再检测是否有该频率的声波被反射回来,通过计算发送和接收的时间,可以知道声波的传输时间,再乘以声波的速度,就可以得到距离.
目前成熟度比较高的是 elmos 的 E524.09/08 。
微波雷达目前应用比较广的是汽车上的自适应巡航、前向碰撞、盲区监测、自动泊车等系统。它们的探测距离会比较远,可以到200米的距离,属于中距离和远距离探测器.
车载上使用的微波雷达,功耗很高,并不适用于普通消费级的低功耗设备上.
目前在普通消费级设备上,使用比较多的是频率在24GHz的毫米波雷达,比如汐杰微的 RKB1125FD 模块,它在1Hz 检测周期下,平均功耗可以做到3.5mW/s 。
测距原理和方式,跟ToF模块相类似,分为两种:一种是通过相位间接得到时间(调频式连续毫米波雷达),一种是直接得到时间(脉冲式毫米波雷达),目前使用的基本上是调频式连续毫米波雷达.

回到文章最开始市场的需求,就目前已经已接触到的模块,并没有哪种类型模块可以满足全部的需求。激光,超声波,毫米波它们都有适合的应用场景,同时也都有各种局限性.
我们需要根据自己的实际使用场景选择合适的模块,也可以多种探测器组合使用.
在市场的驱动下,也许在不久的将来,会有新的技术出来,能够解决上面所有应用场景的限制.

最后此篇关于超声波、毫米波、ToF激光雷达——在低功耗场景的应用选型的文章就讲到这里了,如果你想了解更多关于超声波、毫米波、ToF激光雷达——在低功耗场景的应用选型的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
47
4
 0
0
我试图在处理中获取传感器的距离,但是当我在控制台中输出计算值时,我只能看到 ASCII 文本。我应该如何进行这里? import com.hamoid.*; // Example by Tom Igo
我尝试编写一个应用程序,读取数据并将其发送到路透社 TOF 模拟器。 我使用文件分隔符 (FS ASCII(28)) 向 TOF 服务器发送一条消息,如下所示 package tr.com.cali
最新型号的 Android 手机(Honor View 20、Huawei P30 Pro、Samsung Galaxy 10 5g)具有 TOF(飞行时间)传感器。是否可以通过一些 API 或制造商
我有这个 TOF 传感器,我想在 Qt 中将传感器的数据可视化为点云。我将数据转换为 pcl::PointCloud,现在我想将其可视化。 传感器的 API 会在创建时发出图片。我会将其发送到 QVT

我是一名优秀的程序员,十分优秀!