
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 24
24
 4
4


摘要: 本程序主要实现了python的opencv人工智能视觉模块的目标跟踪功能。
本文分享自华为云社区《 python进阶——人工智能实时目标跟踪,这一篇就够用了! 》,作者:lqj_本人 .
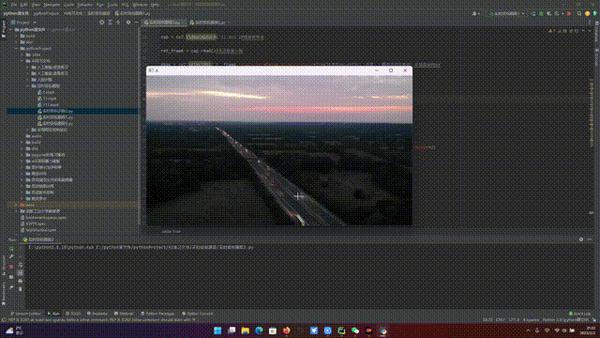
本程序主要实现了python的opencv人工智能视觉模块的目标跟踪功能.
区域性锁定目标实时动态跟踪(适用 警方追捕,无人机锁定拍摄等) 。
特性:
1.BOOSTING:算法原理类似于Harr cascdes(AdaBoost),是一种很老的算法。这个算法速度慢并且不准.
2.MIL:比BOOSTING准一点 。
3.KCF:速度比BOOSTING和MIL更快,与BOOSTING和MIL一样不能很好的处理遮挡问题.
4.CSRT:比KCF更准一些,但是速度比KCF慢 。
5.MedianFlow:对于快速移动的目标和外形比那花迅速的目标效果不好 。
6.TLD:会产生朵的false-posittives 。
7.MOSSE:算法速度非常快,但是准确率比不上KCF和CSRT,在一些追求算法的速度场合很适用 。
8.GOTURN:OpenCV中自带的唯一一个基于深度学习的算法,运行短发需要提前下载好模型文件 。
分别对应的伴生的函数:
kcf:cv2.legacy.TrackerKCF_create
csrt:cv2.legacy.TrackerCSRT_create
boosting:cv2.legacy.TrackerBoosting_create
mil:cv2.legacy.TrackerMIL_create
tld:cv2.legacy.TrackerTLD_create
medianflow:cv2.legacy.TrackerMedianFlow_create
mosse:cv2.legacy.TrackerMOSSE_create
导入cv模块 。
ret,frame =
cap.read()
import cv2
使用csrt算法,引用伴生函数,并赋值给tracker 。
tracker = cv2.legacy.TrackerCSRT_create()
读取视频流 。
cap = cv2.VideoCapture(
'
11.mp4
'
)
先读取到第一帧 。
ret,frame = cap.read()
使用selectROI(前景),画框将目标框起,并赋值给bbox 。
bbox = cv2.selectROI(
'
A
'
,frame,fromCenter=False,showCrosshair=True)
初始化tracker,将上面的两个值传入 。
tracker.init(frame,bbox)
读取每一帧 。
ret,frame = cap.read()
根据每一帧来更新tracker 。
ok,box = tracker.update(frame)
若读取成功,就定位画框,并跟随 。
if
ok :
(x,y,w,h)
= [
int
(v)
for
v
in
box]
cv2.rectangle(frame,pt1
=(
int
(x),
int
(y)),pt2=(
int
(x)+
int
(w),
int
(y)+
int
(h)),color=(
0
,
255
,
0
),thickness=
2
)
显示视频流 。
cv2.imshow(
'
A
'
, frame)
等待50毫秒或按空格键退出 。
if
cv2.waitKey(
50
) == ord(
'
'
):
break
释放视频流和释放窗口 。
cap.release()
cv2.destroyAllWindows()
import cv2
tracker
=
cv2.legacy.TrackerCSRT_create()#使用csrt算法,引用伴生函数,并赋值给tracker
cap
= cv2.VideoCapture(
'
11.mp4
'
)#读取视频流
ret,frame
=
cap.read()#先读取第一帧
bbox
= cv2.selectROI(
'
A
'
,frame,fromCenter=False,showCrosshair=
True)#使用selectROI(前景),画框将目标框起,并赋值给bbox
tracker.init(frame,bbox)#初始化tracker,将上面的两个值传入
while
True:
ret,frame
=
cap.read()#读取每一帧
ok,box
=
tracker.update(frame)#根据每一帧来跟新tracker
# 若读取成功,我们就定位画框,并跟随
if
ok :
(x,y,w,h)
= [
int
(v)
for
v
in
box]
cv2.rectangle(frame,pt1
=(
int
(x),
int
(y)),pt2=(
int
(x)+
int
(w),
int
(y)+
int
(h)),color=(
0
,
255
,
0
),thickness=
2
)
cv2.imshow(
'
A
'
, frame)#显示视频流
if
cv2.waitKey(
50
) == ord(
'
'
):#等待50毫秒或键盘按空格键退出
break
# 释放视频流,释放窗口
cap.release()
cv2.destroyAllWindows()
结果演示 。
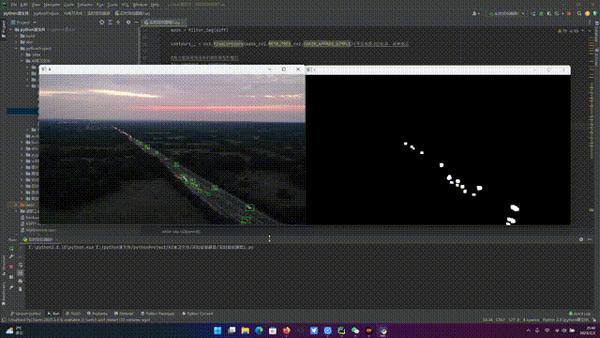
思路构建 。
1.先将实时摄像流或录制视频流,灰度转化并高斯模糊 。
2.用二值化算法将流中的物体轮廓扩充 。
3.分别先读到第一帧和第二帧,让其对比 。
4.寻找对比后,流的轮廓位置,并开启简易模式 。
5.过滤物体的矩阵轮廓将其定位绘出 。
详细代码讲解 。
导入cv模块 。
import cv2
将视频流转换并让其高斯模糊 。
gray =
cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
blur
= cv2.GaussianBlur(gray,(
5
,
5
),
0
)
二值化扩充 。
_,thresh = cv2.threshold(blur,
20
,
255
,cv2.THRESH_BINARY)
dilated
= cv2.dilate(thresh,None,iterations=
3
)
return
dilated
读取视频流或实时摄像流 。
cap = cv2.VideoCapture(
'
11.mp4
'
)
读取第一帧 。
ret,frame1 = cap.read()
读取第二帧 。
ret,frame2 = cap.read()
判断cap是否为打开状态 。
while
cap.isOpened():
若为打开,则第一帧与第二帧比较 。
diff =
cv2.absdiff(frame1,frame2)
mask
= filter_img(diff)
寻找比较后的物体轮廓,并开启简易模式 。
contours,_ = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
使用方框将视频流中的物体框出,得到矩阵的宽高 。
(x,y,w,h) = cv2.boundingRect(contour)
若矩阵的面积小于10(根据视频流中物体的大小来定义),直接无视 。
if
cv2.contourArea(contour) <
10
:
将过滤的物体的矩阵轮廓绘出(一定要用int整形) 。
cv2.rectangle(frame1,pt1=(
int
(x),
int
(y)),pt2=(
int
(x)+
int
(w),
int
(y)+
int
(h)),color=(
0
,
255
,
0
),thickness=
1
)
将第一帧显示 。
cv2.imshow(
'
A
'
,frame1)
将上面赋值的mask显示 。
cv2.imshow(
'
B
'
,mask)
实现前后帧对比,并定位物体运动轨迹 。
1.将第二帧赋值给第一帧 。
frame1 = frame2
2.再将cap读到的赋值给第二帧() 。
ret,frame2 = cap.read()
等待50毫秒或者按空格结束 。
if
cv2.waitKey(
50
) == ord(
'
'
):
break
释放视频流及释放窗口 。
cap.release()
cv2.destroyAllWindows()
import cv2
def filter_img(frame):
#将视频流转换灰度并让其高斯模糊
gray
=
cv2.cvtColor(frame,cv2.COLOR_BGR2GRAY)
blur
= cv2.GaussianBlur(gray,(
5
,
5
),
0
)
#二值化将其扩充
_,thresh
= cv2.threshold(blur,
20
,
255
,cv2.THRESH_BINARY)
dilated
= cv2.dilate(thresh,None,iterations=
3
)
return
dilated
# 读取视频流
cap
= cv2.VideoCapture(
'
11.mp4
'
)
ret,frame1
=
cap.read()#读到第一帧
ret,frame2
=
cap.read()#读到第二帧
while
cap.isOpened():#判断cap是否打开
diff
=
cv2.absdiff(frame1,frame2)#若打开,则第一帧和第二帧作比较
mask
=
filter_img(diff)
contours,_
=
cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)#寻找视频流的轮廓,简单模式
#用方框将视频流中的物体用矩形框出
for
contour
in
contours:
(x,y,w,h)
=
cv2.boundingRect(contour)#得到矩阵的宽高
if
cv2.contourArea(contour) <
10
:#若矩阵的面积小于200,就无视(太小了)
continue
cv2.rectangle(frame1,pt1
=(
int
(x),
int
(y)),pt2=(
int
(x)+
int
(w),
int
(y)+
int
(h)),color=(
0
,
255
,
0
),thickness=
1
)#将过滤的物体的矩阵轮廓绘出
# cv2.drawContours(frame1,contours,
-
1
,(
0
,
255
,
0
),
2
)#将视频流中的物体轮廓画出
cv2.imshow(
'
A
'
,frame1)#将第一帧显示
cv2.imshow(
'
B
'
,mask)#将mask也显示
frame1
=
frame2#将第二帧赋值给第一帧
ret,frame2
=
cap.read()#再将cap读到的赋值给第二帧
if
cv2.waitKey(
50
) == ord(
'
'
):#等待五十毫秒或者按空格结束
break
#销毁cap流
cap.release()
#释放窗口
cv2.destroyAllWindows()
点击关注,第一时间了解华为云新鲜技术~ 。
最后此篇关于python进阶:带你学习实时目标跟踪的文章就讲到这里了,如果你想了解更多关于python进阶:带你学习实时目标跟踪的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
24
4
 0
0
MySQL表的增删改查(进阶) 1. 数据库约束 约束类型 说明 示例 NULL约束 使用NOT NULL指定列不为空 name varchar(20) not null, UNIQUE唯一约束 指定
多线程(进阶) 1. 常见的锁策略 1.1 乐观锁 悲观锁 乐观锁 : 总是假设最好的情况,每次去拿数据的时候都认为别人不会修改数据,但是在对数据提交更新的时候,再去判断这个数据在这个期间是否有别人对
我相信在正确编码的系统中-错误(作为错误或异常)应该是不可能的(DB/memcached服务器故障导致查询失败)。我们的代码不应依赖任何假设才能正常工作,并且应尽可能地证明其正确性。 但是,为了确保我
1. 前言 泛型代码让你能根据你所定义的要求写出可以用于任何类型的灵活的、可复用的函数。你可以编写出可复用、意图表达清晰、抽象的代码。 泛型是 Swift 最强大
一、创建质量配置及关联项目 1.新建一个java代码质量配置 2.为配置添加规则 确认有4条规则了 为项目更换扫描配置 二、创建质量阈关联项目 1.
完整jenkinsfile 、sharelibrary 及jenkins配置见最后 一、gitlab push分支自动匹配 1.添加Generic Webhook插件参数,获取本次提交的分支信息
1.gitlab创建新应用 2.jenkins安装gitlab插件 3.插件安装完成后全局安全配置中使用并配置gitlab认证 4.注销重新登录后自动使用gitlab当前登录
一、部署jenkins master 1.创建Deployment YAML文件 apiVersion: apps/v1 kind: Deployment metadata: name: je
一、docker安装nexus wget https://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo yum clean all
一、新建library文件 build.groovy package org.devops // 构建类型 def Build(buildType,buildShell){
一、制品获取 1.安装及配置插件 配置插件(jenkins项目中) 2.选择对应的制品 3.修改jenkins file // 新增以下代码 String artifactU
1.github创建OAuth 2.jenkins安装并配置github认证插件 jenkins配置使用github认证 3.注销重新登录
一、添加测试Maven项目 1.新建一个gitlab项目 2.导入simple-java-maven-app仓库代码(可以去github或者Gittree上都有) 3.配置mvn 国内源
一、添加AnsiColor插件 二、查看插件语法 1.打开任意pipline项目配置,找到流水线语法,并点击 跳转连接,选择插件,查看帮助 三、修改sharelibrary脚本,优
一、Pipeline概念 1 node/agent(节点) 节点是一个机器,可以是Jenkins的master节点也可以是slave节点。通过node指定当前job运行的机器(这个是脚本式语法)。
一、插件备份和恢复 1.安装备份插件 重启系统后查看 2.配置周期备份 点击进入,点击Settings Backup only builds marked to keep
一、.部署LDAP 这里使用容器部署,手动部署参考:https://www.cnblogs.com/panwenbin-logs/p/16101045.html 1.安装docker wget -
由于sonarqube开源版本不支持多分支管理,在扫描所有分支的时候都会指定同一个sonar项目,不便于我们查看 一、下载开源插件 项目地址:https://github.com/mc1arke/
一、手动测试 注意此版本已经内置包含Java语言扫描插件,不再需要单独安装 1.clone代码 git clone git@192.168.1.128:root/demo-maven-serv
我有下一种情况。 从 PHP 表单中我只获得公司 ID 我需要使用该公司 ID 排列所有用户名 我需要数组并将具有该用户名的所有日志导出到表 我的问题是,当我尝试下一步时: $sql2 = "SELE

我是一名优秀的程序员,十分优秀!