
 个人中心
个人中心 文章发布
文章发布
作者热门文章
- Java锁的逻辑(结合对象头和ObjectMonitor)
- 还在用饼状图?来瞧瞧这些炫酷的百分比可视化新图形(附代码实现)⛵
- 自动注册实体类到EntityFrameworkCore上下文,并适配ABP及ABPVNext
- 基于Sklearn机器学习代码实战



 36
36
 4
4


PS2采用SPI通信协议 。
250Khz ~ 4us 。
数据不稳定可以适当增加频率 。
下面是 数据意义对照表 ,其中idle表示空闲 。
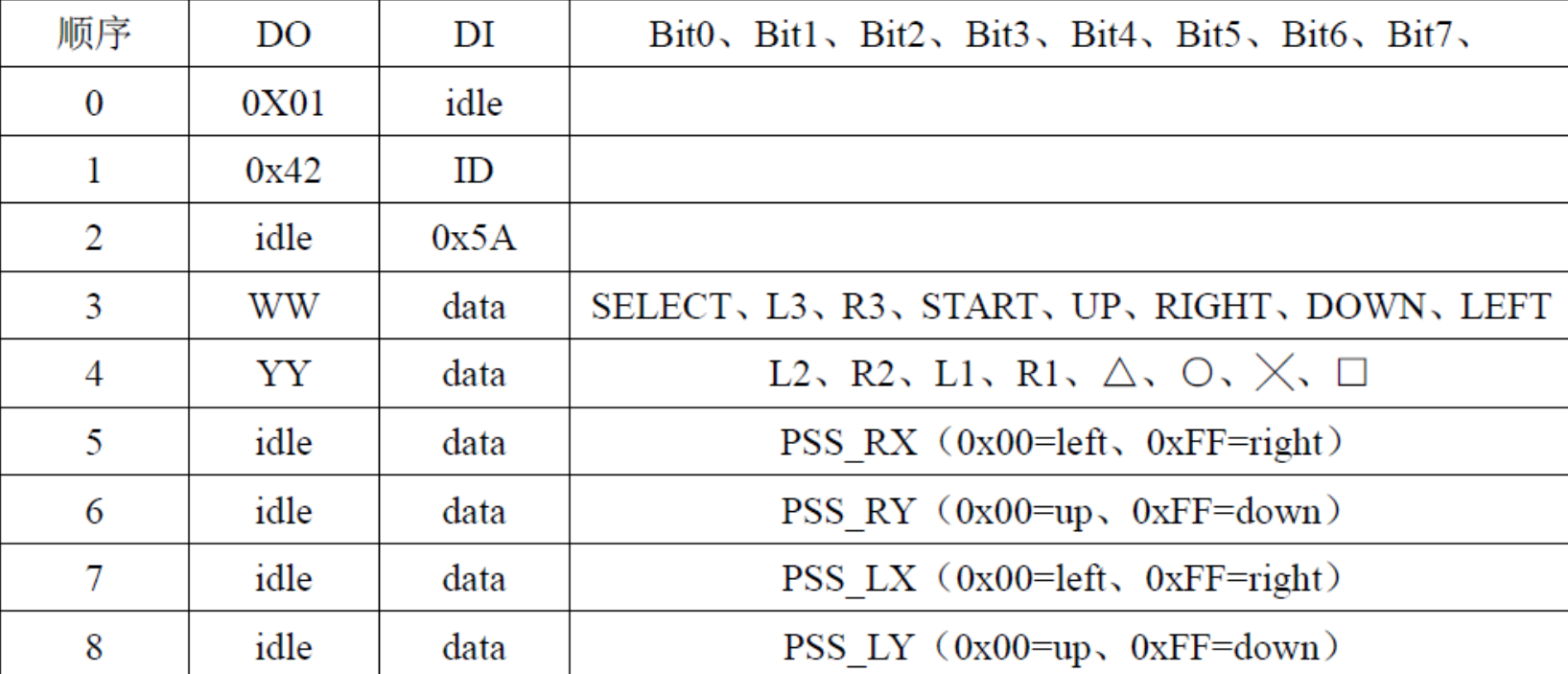
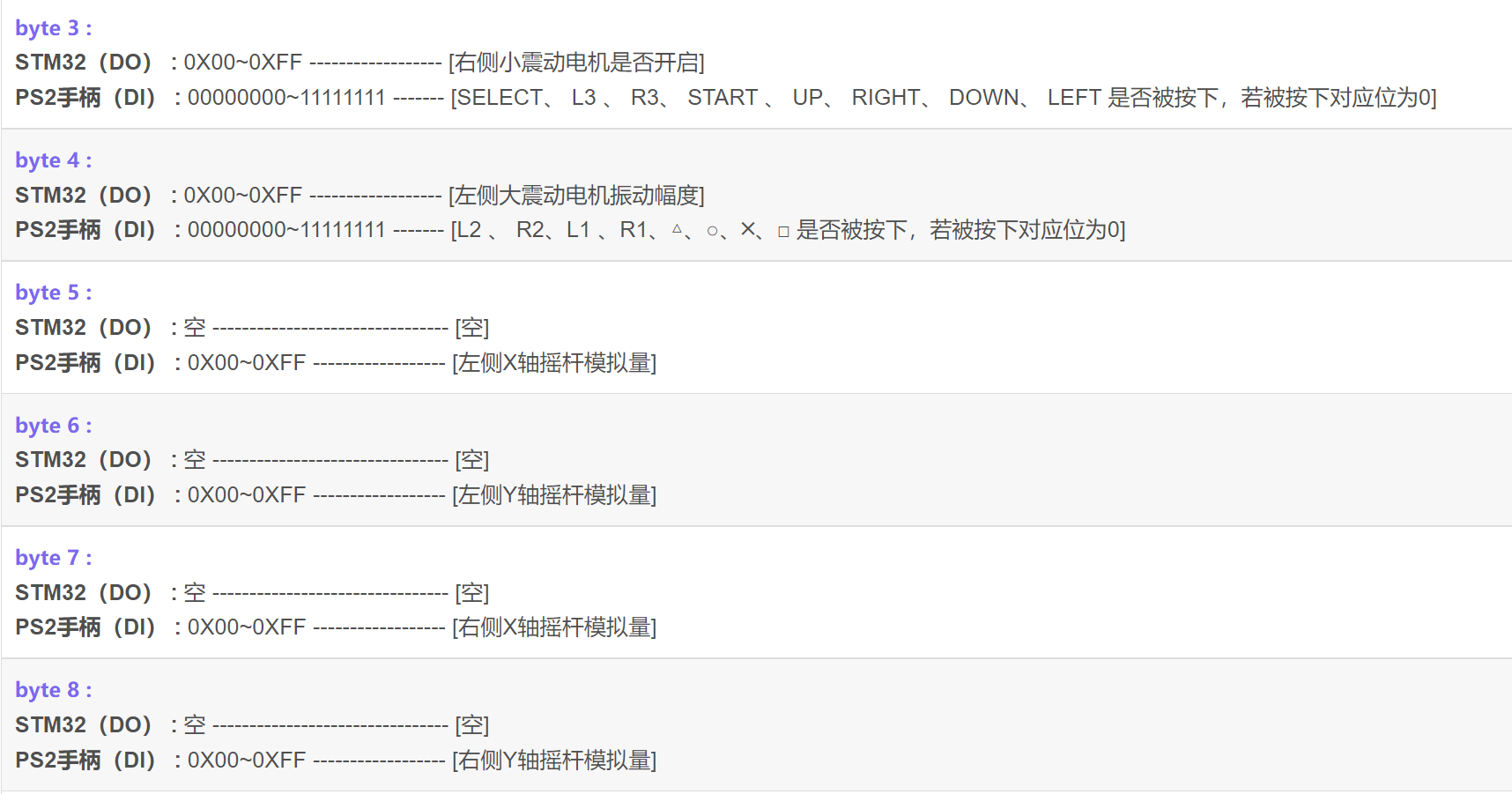
顺序3~8的解析 。
初始化GPIO接口 。
void PS2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//使能PORTB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
//配置 PB13 PB14 PB15 为 通用推挽输出,速度为50mMhz
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStruct);
//配置 PB12 为 下拉输入模式
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPD;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12;
GPIO_Init(GPIOB, &GPIO_InitStruct);
}
发送数据给PS2的同时接收PS2的数据 。
#define DI PBin(12) //PB12 输入
#define DO_H PBout(13)=1 //命令位高
#define DO_L PBout(13)=0 //命令位低
#define CLK_H PBout(15)=1 //时钟拉高
#define CLK_L PBout(15)=0 //时钟拉低
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
void PS2_Cmd(u8 CMD)
{
volatile u16 ref=0x01;
//重置数据
Data[1] = 0;
for(ref=0x01;ref<0x0100;ref<<=1)
{
//检测是否有指令需要发送,有指令则拉高电平
if(ref&CMD) DO_H;
else DO_L;
//先拉高时钟线电平,然后降低,然后再拉高,从而同步发送与接收数据
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
//若接受到数据,则在对应数据位写1
if(DI)
Data[1] = ref|Data[1];
}
//发送完八位数据之后延时一段时间
delay_us(16);
}
读取手柄数据 。
#define DI PBin(12) //PB12 输入
#define DO_H PBout(13)=1 //命令位高
#define DO_L PBout(13)=0 //命令位低
#define CS_H PBout(14)=1 //CS拉高
#define CS_L PBout(14)=0 //CS拉低
#define CLK_H PBout(15)=1 //时钟拉高
#define CLK_L PBout(15)=0 //时钟拉低
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
//用于存储两个命令,分别是开始命令和请求数据命令
u8 Comd[2]={0x01,0x42};
void PS2_ReadData(void)
{
volatile u8 byte=0;
volatile u16 ref=0x01;
//片选线拉低电平以选中接收器
CS_L;
//发送请求命令和请求数据命令
PS2_Cmd(Comd[0]);
PS2_Cmd(Comd[1]);
//依次读取数组Data的后七个位置
for(byte=2;byte<9;byte++)
{
//将数据写入Data的后七个位置
for(ref=0x01;ref<0x100;ref<<=1)
{
CLK_H;
DELAY_TIME;
CLK_L;
DELAY_TIME;
CLK_H;
if(DI)
Data[byte] = ref|Data[byte];
}
//每发送完八位数据之后延时一段时间
delay_us(16);
}
//拉高片选线电平结束通信
CS_H;
}
判断是否为红灯模式,return0则为红灯模式 红灯的ID为“0x73”,绿灯的ID为“0x41” 。
#define CS_H PBout(14)=1 //CS拉高
#define CS_L PBout(14)=0 //CS拉低
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
//用于存储两个命令,分别是开始命令和请求数据命令
u8 Comd[2]={0x01,0x42};
u8 PS2_RedLight(void)
{
CS_L;
PS2_Cmd(Comd[0]);
PS2_Cmd(Comd[1]);
CS_H;
//判断是否是红灯模式的ID
if( Data[1] == 0X73) return 0 ;
else return 1;
}
重置Data数组的所有位 。
void PS2_ClearData()
{
u8 a;
for(a=0;a<9;a++)
Data[a]=0x00;
}
返回按键的对应键值 ,键值用按键名的宏去定义 按键按下为0,未按下为1 。
//用于储存按键值
u16 Handkey;
//数据存储数组
u8 Data[9]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
u16 MASK[]={
PSB_SELECT,
PSB_L3,
PSB_R3 ,
PSB_START,
PSB_PAD_UP,
PSB_PAD_RIGHT,
PSB_PAD_DOWN,
PSB_PAD_LEFT,
PSB_L2,
PSB_R2,
PSB_L1,
PSB_R1 ,
PSB_GREEN,
PSB_RED,
PSB_BLUE,
PSB_PINK
};
//PS2按键键值的宏定义
#define PSB_SELECT 1
#define PSB_L3 2
#define PSB_R3 3
#define PSB_START 4
#define PSB_PAD_UP 5
#define PSB_PAD_RIGHT 6
#define PSB_PAD_DOWN 7
#define PSB_PAD_LEFT 8
#define PSB_L2 9
#define PSB_R2 10
#define PSB_L1 11
#define PSB_R1 12
#define PSB_GREEN 13
#define PSB_RED 14
#define PSB_BLUE 15
#define PSB_PINK 16
#define PSB_TRIANGLE 13
#define PSB_CIRCLE 14
#define PSB_CROSS 15
#define PSB_SQUARE 16
u8 PS2_DataKey()
{
u8 index;
PS2_ClearData();
PS2_ReadData();
//将所有按键对应的位整合成一个16bit的数据
Handkey=(Data[4]<<8)|Data[3];
for(index=0;index<16;index++)
{
//遍历这个16bit的数据,并返回被按下按键的值,按键的值被宏定义
if((Handkey&(1<<(MASK[index]-1)))==0)
return index+1;
}
return 0;
}
返回摇杆的状态数值 。
u8 PS2_AnologData(u8 button)
{
return Data[button];
}
不同的button的值所读取的数据:
返回的摇杆的模拟值在0~255之间 。
x方向最左边为0,最右边为255 。
y方向最上方为0,最右边为255 。
手柄配置初始化 。
void PS2_SetInit(void)
{
PS2_ShortPoll();
PS2_ShortPoll();
PS2_ShortPoll();
PS2_EnterConfing(); //进入配置模式
PS2_TurnOnAnalogMode(); //“红绿灯”配置模式,并选择是否保存
//PS2_VibrationMode(); //开启震动模式
PS2_ExitConfing(); //完成并保存配置
}
设置发送模式 。
void PS2_TurnOnAnalogMode(void)
{
CS_L;
PS2_Cmd(0x01); //设置成0x01为红灯模式,0x00为绿灯模式
PS2_Cmd(0x44);
PS2_Cmd(0X00);
PS2_Cmd(0x01);
PS2_Cmd(0x03); //Ox03锁存设置,即不可通过按键“MODE”设置模式。
//0xEE不锁存软件设置,可通过按键“MODE”设置模式。
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
PS2_Cmd(0X00);
CS_H;
delay_us(16);
}
最后此篇关于STM32与PS2的无线通信和相关函数介绍的文章就讲到这里了,如果你想了解更多关于STM32与PS2的无线通信和相关函数介绍的内容请搜索CFSDN的文章或继续浏览相关文章,希望大家以后支持我的博客! 。
36
4
 0
0
大多数语言都支持双向进程通信。例如,在 Python 中,我可以(草率地)执行以下操作: >>> from subprocess import * >>> p = Popen('nslookup',
致力于使用 C++ 在 arduino 和 PC (Win 7) 之间进行通信。使用 WriteFile 和 ReadFile 创建通信或简单地发送或接收数据没有问题。但是当我想以某种方式“协调”沟通
我们正在开发一个基于微服务的应用程序。它们将使用 Helm Package Manager 部署到 kubernetes,并且它们都存储了自己的存储库和 helm chart。以下是我们微服务的名称。
我正在开发一个大型 MVVM 应用程序。我为此使用了 MVVM 轻量级工具包。该应用程序就像一个带有后退和前进按钮的网络浏览器。主视图是一个用户控件。我在主视图用户控件中放置了后退和前进按钮。主视图又
我在 java 和 freepascal(lazarus) 应用程序之间的通信有问题。我使用套接字。它们正确连接。一切都很顺利,直到我想从一个应用程序向另一个应用程序发送一些东西。在java而不是“a
我已经使用客户端套接字和服务器套接字使用C#编写了群聊。 当我使用VS 2017在自己的PC中运行程序(服务器和客户端)时,客户端和服务器之间的通信工作正常。 当我在笔记本电脑中运行客户端程序,并在自
Kubernetes 中两个不同 Pod 之间的通信是如何发生的? 就我而言,我有两个 Pod:前端和后端,它们都有不同的容器。 我希望我的前端 pod 与后端 pod 通信,但我不想使用后端 pod
我正在尝试在浏览器中嵌入的 flash 实例与在 C# WinForms 应用程序中运行的 flash 实例之间进行通信...我收到一个编译错误,内容为: 1119 Access of possibl
鉴于网络上缺乏信息,请问一个问题:我要在 Android 中创建一个应用程序,使用一个数据库应用程序 rails 。为此,我需要一个手动 session 。所以如果有人准备好了示例/教程显示通信 an
我正在编写一个应用程序,它将通过 MySQL 数据库对用户进行身份验证。我已经用 Java (android) 编写了它,但现在正在移植到 Windows 手机。 PHP 文件使用 $get 然后回显
是否可以通过互联网在两个不同设备上的两个不同应用程序之间建立通信。我想从设备 A 上的应用程序点击一个设备 B 上的应用程序,然后从设备 B 上的应用程序获取数据到设备 A 上的应用程序。如果可能,如
这是脚本: 它被放置在其他网站上。 com 并显示一个 iframe。如果有人点击 iframe 中的某个内容,脚本应该将一个 div 写入 othersite 。 com. 所以我的问题是如何做到
你好我是 php 的新手,我用 c++ 编写了整个代码并想在 php 中使用这段代码。所以我为我的代码制作了 dll 以使用它。但是我不能在 php 中使用这个 dll,可以谁能给我完整的代码来使用
我确定之前已经有人问过(并回答过)此类问题,所以如果是这样,请将我链接到之前的讨论... 在 C++ 中,假设我有一个 ClassA 类型的对象,其中包含一个 ClassB 类型的私有(private
我正在尝试使用 ATmega32 进行串行通信。首先,我使用 RS232,使用 USB-to-RS232 建立使用串行终端的接收和传输(在我的例子中是 tera 术语)。无论我从串行终端 Atmega
我找不到适用于 Ruby 的 SSL 实现。 我的部分项目需要服务器和客户端之间的安全通信链接,我希望为此使用 SSL 以创建安全 session 。 谢谢 最佳答案 如果你使用 Ruby 1.9.x
我正在尝试在客户端/服务器之间进行 SSL 通信。 到目前为止,我已经从 keystore 创建了 java.security.cert.X509Certificate。接下来我应该怎么做才能使这次沟
我在与 Windows 上的 USB 设备 通信时遇到问题。我不能使用 libusb 或 WinUSB,因为我有一个特定的驱动程序(Silabs USB 到 UART,这是一个 USB 到串口的桥接器
按照目前的情况,这个问题不适合我们的问答形式。我们希望答案得到事实、引用或专业知识的支持,但这个问题可能会引发辩论、争论、投票或扩展讨论。如果您觉得这个问题可以改进并可能重新打开,visit the
我发现 xcom 实际上是将数据写入数据库并从其他任务中提取数据。我的数据集很大,将其腌制并写入数据库会导致一些不必要的延迟。有没有办法在不使用 xcom 的情况下在同一 Airflow Dag 中的

我是一名优秀的程序员,十分优秀!